これぞ高専――実践力を生かしたユニークな創造作品が全国から集結:高専プロコンリポート(2/4 ページ)
自由部門 特別賞「パペレース」(石川高専)
女子学生のみで参加していた石川高専。自由部門全チームの発表を見た中で、記者がプレゼンテーション能力、アイデア(独創性)に優れていると感じたチームの1つがここだ。驚いたことに、チームメンバー全員がまだ3年生だという。
 パペット作成の様子。定められた範囲内であれば幾つのパーツを組み合わせてもよいという
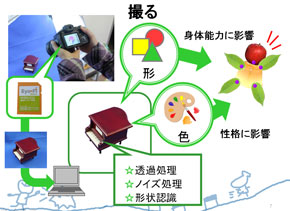
パペット作成の様子。定められた範囲内であれば幾つのパーツを組み合わせてもよいというそんな彼女らが作成したのは、障害物レースに挑むオリジナル人形「パペット」の製作体験システム「パペレース」。マルチタッチ入力が可能な自作のタッチパネル式テーブルデバイスと無線LAN内蔵SDカード「Eye-Fi」を用いた撮影用カメラ、タッチパネルテーブルの下から投影するWebカメラ、PCで構成されている。
ユーザーは自分の好きな物体を写真に収めることで、それをパペットのパーツとして作成できる。撮影した画像はEye-Fiで自動的にPCに送信され、画像の透過処理やノイズ処理が行われる。また、同時に形状認識も行っており、判断した色、形が作成するパペットのパラメータ(身体能力、性格)に影響を及ぼすようになっている。
パペットの作成操作はすべてマルチタッチテーブル上で行う。タッチ操作は直接手で行えるが、デモンストレーション時には、会場が明るいことでWebカメラが投影できないことから、自作したタッチペンで操作をしていた。タッチペンはボタンを押すことで先端から赤外線LEDが発光する仕組みとなっており、Webカメラは、赤外線ペンから照射される赤外線を取得している。撮影した映像データはtBetaというオープンソースソフトウェアに送信され、tBetaではそのデータをパペレースで使用する座標やイベントに変換している。
 (左)パーツとピンの構造や、パラメータに応じて、動きが異なる
(左)パーツとピンの構造や、パラメータに応じて、動きが異なるパペットの動きは、パーツの中心にピンがあった場合には円運動を行い、先端側にパーツが止まっていた場合には振子運動を行うなど、ピンとパーツの位置関係によって大きく2つに分類されている。レース中に登場する障害物は、犬、滑り台、プールといった13種類のバリエーション豊かなものが用意されており、パペットは自身の身体能力、性格によってそれらを乗り越えていく。
パペレースのコンセプトは「発想力の創造」。撮る、組み立てる、楽しむという3工程を通じで、ユーザーが新たな発想を見つける足掛かりにしてほしいという。
自由部門 特別賞「magnet station―動けマグネット―」(鳥羽商船高専)
鳥羽商船高専が開発したのは、「動くモノ」に反応するという人間の自然行動に着目し、磁石が取りつくものさえあれば、どこでも使用できる汎用的なディスプレイシステム「magnet station」。
2つの車輪それぞれに強力なネオジム磁石を取りつけたロボットを無線LANで経由で制御することで、ホワイトボードなどマグネットが着く場所でロボットを思い通りに動作させることが可能だという。プレゼンテーションでは、ロボットを複数台同時に動作させ、上部にオブジェクトを取りつけることで人形劇を再現したり、学校に設置されている掲示板で目立たせたいものをロボットに取りつけることで、人の注意を引くといった用途を提案していた。
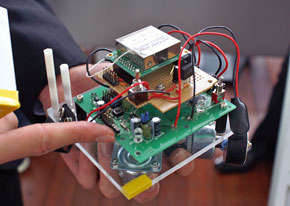
 (左)ネオジム磁石はロボット1台につき2個取りつけられている
(左)ネオジム磁石はロボット1台につき2個取りつけられているロボットはネオジム磁石や、通信するためのWiPort(CPU、無線LAN、Webサーバ、入出力ポートなどを搭載したマイクロコンピュータ。magnet stationでは、無線LAN経由で送られてきた信号を受信するために使用)、制御信号を受け取ってモータを動かすための駆動回路を実装している。1台当たりのコストは約5万円。
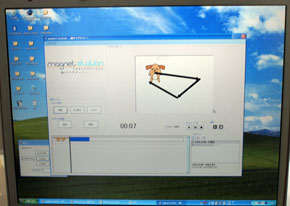
動作は、専用のGUI(ロボット操作アプリケーション)で初期位置、進行経路を登録する。初期設定で動かすロボットの個数やマグネットボードの大きさを指定でき、操作はマウスのクリックとドラッグ&ドロップのみで行えるようにした。
動作設定画面では、ロボットを動かす前に動作の軌跡をソフトウェア上で確認できる「シミュレーション機能」や始点と終点を結ぶことで同じ区間内を動作させ続ける「リピート再生機能」も実装している
 (左)取りつけるオブジェクトは1.5キロまでなら耐えられる
(左)取りつけるオブジェクトは1.5キロまでなら耐えられるロボット制御の仕組みは、モータの右回りを正転とし、正転を1、逆転を0で表現。例えば直進のときは1(モータON)、1(左モータ)、0(右モータ)というようにロボットに信号を送る。現在はすべて同じ速度での動作のみだが、将来的にはPWM制御を用いた速度変化も実装したいという。
審査委員からは「非常に面白いが、もう少し工夫すれば有用性があった」といった意見が聞かれ、単3電池4本で2時間という限られた駆動時間ならば、無線LAN経由のデータ送信ではなく、マイコンを用いた方がよかったのでは、というアドバイスが述べられた。
Copyright © ITmedia, Inc. All Rights Reserved.
注目のテーマ




人気記事ランキング
- 江崎グリコ、基幹システムの切り替え失敗によって出荷や業務が一時停止
- 生成AIは2025年には“オワコン”か? 投資の先細りを後押しする「ある問題」
- Javaは他のプログラミング言語と比較してどのくらい危険なのか? Datadog調査
- 投資家たちがセキュリティ人材を“喉から手が出るほどほしい”ワケ
- 「Gemini」でBigQuery、Lookerはどう変わる? 新機能の詳細と利用方法
- AIを作る、使う人たちへ 生成AI普及で変わった「AI事業者ガイドライン」を読もう
- Appleの生成AI「MM1」は何ができるの? 他のLLMを凌駕する性能とは
- ゼロトラストの最新トレンド5つをガートナーが発表
- WordPressプラグイン「Forminator」にCVSS 9.8の脆弱性 急ぎ対処を
- OpenAI Japan設立 岸田首相への宣言から1年 日本語特化GPT提供へ 速度3倍コスト半減
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。