レスキューロボット、実用化への道――消防隊員がトライ
防災の日を翌日に控えた8月31日、災害現場に日々直面する川崎市消防局の隊員たちが、“災害時に人間にかわって活動するロボット”をテーマに研究を進める国際レスキューシステム研究機構(IRS)にてレスキューロボットを実際に操作し、実用化に向けての操作実験を行った。
現場での“相棒”となる可能性を秘めた、ロボットを操作してみての感想はどうだったのだろうか。
レスキューロボットを操作した消防隊員の感想は?
今回、隊員たちが操作実験を行ったのはヘビ型の「蒼龍」(東京工業大学 広瀬研究室)、「KOHGA」(電気通信大学 松野研究室・日本SGI)、4輪駆動の「FUMA」(電気通信大学 松野研究室・稲見研究室・日本SGI)の3体。隊員達からは操作感についての感想から、実際の災害現場に持っていくことを仮定しての質問まで、幅広い意見が寄せられた。
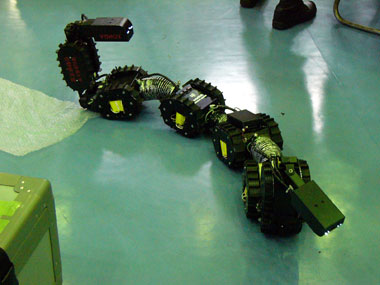
 蒼龍を操作する隊員
蒼龍を操作する隊員蒼龍はクローラで囲まれた3個のユニットを結合したヘビ型ロボットで、今回の3台の中では走破性を重視したタイプ。先端にはカメラが取り付けられており、狭いところに進入した場合にはその映像を見ながら操作することになる。
隊員からは、「操作に対しての反応が少し繊細で、(内蔵カメラの映像を見ず、見下しながら操作しても)動かすのが難しい」「どう操作すればどう動くのか、関係がつかみにくい」といった操作感覚に関する意見のほか、「カメラ映像の上下反転はできるか?」「スピーカーやマイクは搭載しているか?」「重量と動作時間は?」といった実際の救助現場での使用を想定した意見も寄せられた。
 蒼龍の本体前部にはカメラが取り付けられており、狭いところに進入した場合にはその映像を頼りに操作することになる。「先端からさらにファイバースコープを出すことができたり、カメラ自体の視野がもっと広ければ」という要望も
蒼龍の本体前部にはカメラが取り付けられており、狭いところに進入した場合にはその映像を頼りに操作することになる。「先端からさらにファイバースコープを出すことができたり、カメラ自体の視野がもっと広ければ」という要望もKOHGAは蒼龍と同じくヘビ型だが、無線操作が可能になっているほか本体の後部にもカメラが取り付けられており、より高い活動範囲と状況把握能力を持つ。また、サソリの尾のように、後部の高い位置に保持されたカメラの映像を見ながら操作することができるため、操作性も高い。
 本体前後にカメラを持つKOHGA。後部カメラは写真のように高い位置に保持することができるため、より広い視野を持つ
本体前後にカメラを持つKOHGA。後部カメラは写真のように高い位置に保持することができるため、より広い視野を持つ蒼龍に比べてカメラから得られる情報が多いため、「後部カメラから全体の映像を得ることができるのはうれしい」と隊員からもその点を歓迎する声が多かったものの、蒼龍よりも大型になってしまっうことをマイナスとして感じた隊員もいたようだ。
「災害現場では使用する人間も疲労している。もう少し小型化してもらえた方がうれしい」「持ち運ばなくてはならないことを考えると、蒼龍のサイズでギリギリかもしれない」
 KOHGAの操作はPlayStation用コントローラで行う。普段身近なものだけに、隊員たちもあまり違和感を感じなかったようだ。右画面が前部、左画面が後部カメラからの映像
KOHGAの操作はPlayStation用コントローラで行う。普段身近なものだけに、隊員たちもあまり違和感を感じなかったようだ。右画面が前部、左画面が後部カメラからの映像FUMAは3台中、唯一の4輪駆動タイプ。やや大ぶりなものの、3台のカメラと各種センサーを装備しており、人の入っていけない災害現場での情報収集に威力を発揮する。
 FUMA。4輪駆動による移動スピードの速さと、アーム先端に設けられたカメラによる視野の広さが特徴
FUMA。4輪駆動による移動スピードの速さと、アーム先端に設けられたカメラによる視野の広さが特徴車と同じ4輪駆動ということで、「30分もしない内にある程度慣れることができた」「すぐに動きをつかむことができた」と操作感については高い評価を得ていた。こちらもKOHGAと同様に操作インタフェースにはPlayStation用コントローラが利用されており、「若い世代ならば(笑)、すぐに慣れることができるでしょう」という感想も。
 FUMAもKOHGAと同じく無線で操作する。操作感という点では3台の内で最も高い評価を得ていた
FUMAもKOHGAと同じく無線で操作する。操作感という点では3台の内で最も高い評価を得ていたただ、蒼龍やKOHGAとの感覚の違いに戸惑った隊員もいたようで「(蒼龍、KOHGAに比べて)操作の繊細さに欠ける気がします」という意見のほか、「段差に弱い」「FUMAの入ることのできるスペースならば、ほふく前進で入ることもできる」「すぐに転倒してしまう」という厳しい意見も見られた。ほんの小さなことが要救助者の生死を分ける災害現場を体験している隊員ならではの意見だ。
心理的抵抗はない――課題は“仲間”としての「信頼性の見極め」
一通りの操作実験を行った後のディスカッションでは、災害救助ロボット全体に対しても隊員から意見が寄せられた。
「新しくレスキュー機器を導入する場合、業者からのレクチャーは1時間程度で、あとは日々の訓練で習熟していくことになる。(ロボットも)1時間程度のレクチャーで基本動作を習得できないと困る」
「ロボットが現場にはいることによって、人間の作業スペースが狭くなってしまうのはつらい」
「稼働時間が30分程度というのでは困る。最低でも1時間は連続駆動して欲しい」「何かあった場合には現場で修理・メンテナンスすることも必要になる。シンプルさが最も要求される」
こうした意見は、一見すると厳しい意見であるように思われるが、決してロボットの導入に否定的なのではない。
「既に消防ロボットなどは一部で導入されており、どこまで耐久性があり、どこが限界点なのかがはっきりしていればロボットの導入について、心理的な抵抗はない」というように、現時点では、限界状況の中で利用する機械としての信頼性や可能性を隊員たちも図りかねている様子だ。
これまでにもIRSでは、関係者とのディスカッションを通じてレスキューロボットへ求められる条件をヒヤリングしているが、現場活動に従事する消防隊員がロボットを操作し、意見を交換するのは今回が初めて。
IRSでは「5年以内のレスキューロボットの実用化」を目標にしており、その目標を掲げてから2年半が経過している。研究開発を進め、ようやく実際の救助に携わる人にロボットを操作してもらう段階にたどり着いた。ようやく折り返し点に到達したと言える。
災害現場という極限状態で利用されるロボットの開発において、経験を持つ人たちからのフィードバックな何よりも欲しいものだ。IRS川崎ラボリーダの松野文俊氏(電気通信大学教授)も「根本的な見直しをしなくてはならない可能性もあるが、実務的・実用的なフィードバックは非常にほしい」と述べる。
今回の実験から得られた貴重な意見が、「5年以内のレスキューロボットの実用化」という目標に向かって研究を加速させることは間違いないだろう。
(協力:川崎市消防局)
関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PR


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。