第1回「Weird-7、大地に立つ」:ロボットキット「Weird-7」を作りました(6/6 ページ)
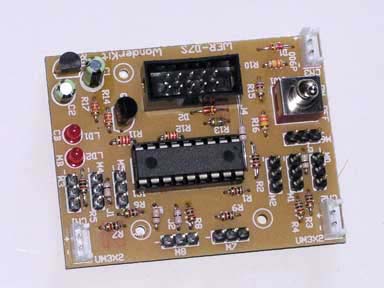
基板は45×60ミリくらいの小さなものだ。
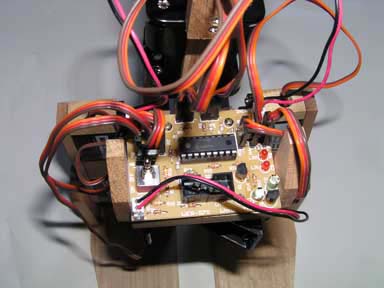
これを腰の後ろに取りつける。それに先立って、腰中央のモータのケーブルを基板取りつけ台の隙間(がちゃんとあるのだ)を通して体の左側に引っ張り出しておく。
また、基板取りつけの台は木ねじで固定されているのだけど、このネジ頭に基板裏側がショートすると、たぶんこわれる。ネジはしっかりねじ込んで飛び出していないようにする。わたしは、それでも不安だったので、取りつけ台と基板の間に紙を1枚敷いた。
基板は、短い木ねじで固定。穴の位置が非対称なので、向きを間違えることはない。
次に電池ボックスの取りつけ。腰のうしろに006P、胴体の左右に単三×2のボックスをとりつける。
最後にケーブルのコネクタを、基板にさし込んでいく。マニュアルを見ると、モータは左足先から順番に番号付けされている。左足先は0番なので、ここから来たケーブルのコネクターは、基板の「M0」というコネクタにさし込めばいいというわけ。
このとき、モータのケーブルのコネクタに油性ペンで番号をふっておくことがすすめられている。これはたしかにそうで、番号があれば、メインテナンスなどでコネクターを抜いたときや事故で抜けちゃったとき(よくあるのだ)に直すのが簡単だ。
ただ、コネクタは黒い。黒いところに透明インクな油性ペンで書いてもあんまりよくみえない。白いペンが欲しくなったんだけど、あいにく持ってないので、とりあえず青いマッキーで書いた。光の反射でよめるはよめる。こんど白いペンで書き直すことにしよう*12。
仕上げ
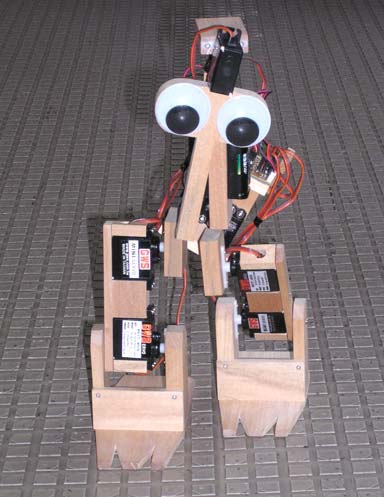
わすれてはいけない。目玉シールを顔にはりつける。うん、かわいくなった。
ビニタイで、ケーブルをまとめてあんまりうろうろしないようにさせる。ロボットが動くときにケーブルを引っ掛けるという事故はよくあるので、ここは大事。さらに、ワイヤーステッカーで本体にケーブルを密着させることになっているのだけど、これをするとメンテナンスが面倒になるので、まずは、動作を確認してからにすることにした。
足裏に貼るためのゴムシールもある。ロボットの足裏の条件というのはかなり微妙なもので、どんな地面に立つかによって、滑ったほうがいい、滑らないほうがいい、いろいろ変わってくるのだ。ここでは、まず貼らないでみて様子を見ることにした。
これで、とりあえず完成! 3時間30分かかった。左右の足のところでやり直したりして時間を使っちゃったのもあるけど、それがなくても3時間で終わったかどうかはちょっと微妙なかんじ。
さて、今回はここまで。というのも、電池を用意するのを忘れてしまったのだ。ちょっと買いに行ってくるので*13、「動かし編」は次回、乞うご期待。
*12 シールを貼ることも考えたんだけど、ちょっと剥がれそうな気がする。
*13 最近ダイソーで006Pが買えるんでありがたい。2本100円だったりするしね。
関連記事
- 3点倒立するロボットも登場――「ROBO-ONE」第3回大会
2足歩行ロボットの競技大会「ROBO-ONE」が日本科学未来館で開催。2月1日の予選では、規定演技のボックスダンスを軽やかに踊ったり、3点倒立するロボットも登場した
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PR


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。