レスキューロボット「Hibiscus」を操縦してきました:っぽいかもしれない(2/2 ページ)
このメインクローラーの改良は非常に大きな効果を上げた。制作途中で、まずメインクローラーだけの走行実験をしたところ、相当の瓦礫でもそれだけでどんどん乗り越えてしまうのだそうだ。だからHibiscusのフリップアームは、それで動くというものではなく、ふんばったり姿勢を変えたりする文字通りの「腕」なのだそうだ。
では、デモの様子を動画で紹介しよう。操縦は千葉工業大学2年の桐林星河さん。解説の音声は小柳先生。
 でたらめに積み上げたブロックの山をHibiscusが乗り越えて進む(
でたらめに積み上げたブロックの山をHibiscusが乗り越えて進む( おなじところを03が挑む(
おなじところを03が挑む(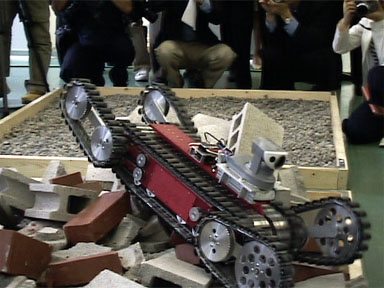 Hibiscusの帰り道。フリップアームを全く使っていない(
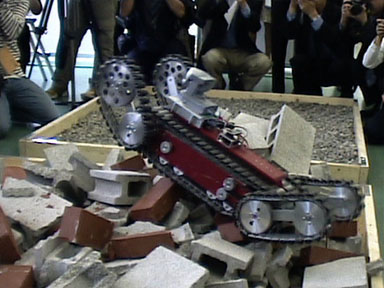
Hibiscusの帰り道。フリップアームを全く使っていない(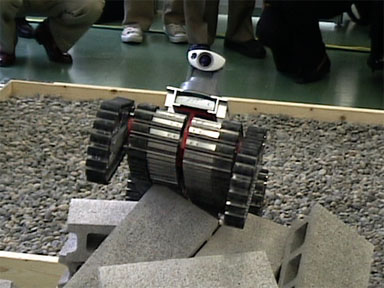 Hibiscusが、滑りやすい砂利道から瓦礫にいきなり上った。さすがにフリップアームが活躍する(
Hibiscusが、滑りやすい砂利道から瓦礫にいきなり上った。さすがにフリップアームが活躍する( 同じところを03が挑んだのだが、ブロックがボディ前面に引っかかってしまい、スタックしてしまった(
同じところを03が挑んだのだが、ブロックがボディ前面に引っかかってしまい、スタックしてしまった(さて、発表会終了後、Hibiscusの操縦をやらせてもらった。本当はマシンそのものは見ないで、搭載されたカメラ画像だけで操縦しなきゃいけないんだけど、今回は目でマシンを見ての操縦。ラジコン気分だ。
操作はプレステ型のゲームパッドを使う。前進後退、左右旋回は、アナログジョイスティックをただ傾ければ、メインクローラーの左右がそれぞれ動くようになっている*2。簡単だ。ほんとに、これで瓦礫の山をどんどん上って行くのだ。
でも、4つのフリップアームは自分で操作しなければいけない。ゲームパッド側面のボタン(L1、L2、R1、R2のこと)がそれぞれのアームに対応しているので、ボタンを押しながらもうひとつのジョイスティックを動かすと対応したアームが動くという仕組みだ。これはさすがに、とっさにはどうすればいいかわからない。動けなくなったときに、どのアームをどう動かせば乗り越えることができるのかは素人にはわからないのだ。
 操作はプレステ型のゲームパッドを使う
操作はプレステ型のゲームパッドを使うそこで、いまこれを自動化する研究が進められている。大雑把に言って、これは2つの方法からなる。1つめは、モーターにかかる負荷をモニターして、過大な負荷がかかったら、それに応じてアームを動かすというもの。かなりの瓦礫まではこれで乗り越えられるのだそうだ。それでもだめだと2つめのもっとインテリジェントな方法になる。カメラと外界センサーから障害物の高さや形状を判断して、アームはそれを乗り越えるための動きをするというものだ。この動きは熟練者があらかじめモーションを作っておくことになる。ただ、瓦礫の高さはいろいろあるので、それをパラメータとして与えられるようなモーションだ。
これがうまくいくと、1本のジョイスティックをいきたい方向にいきたい速度分傾ければ、環境はロボットが判断してそっちに進むということができるようになる。わたしでも操縦できるというわけだ。これは今年度中の完成を目指しているそうなので、できあがったらまた操縦させてもらいに行きたい*3。
*2現バージョンは、機械保護のために、操作してから動くまでに1秒くらいのタイムラグをわざといれてあったのだけど、これは実際の運用では外れる
*3ところで、今回わたしが操縦したらすぐにクローラーが外れてしまってびっくりしたのだけど、いまは開発用にわざと外れやすく作ってあったのだそうだ。桐林さんは、そのへんをわかって操縦したのだね
関連記事
 fuRo、新型レスキューロボット「Hibiscus」を披露
fuRo、新型レスキューロボット「Hibiscus」を披露
千葉工業大学未来ロボット技術研究センター(fuRo)の小柳栄次副所長と吉田研究員の開発チームは6月5日、瓦礫の上を安定して走行できる新型レスキューロボット「Hibiscus」を公開した。 悪路もOK――変形移動ロボット「チャリべえ」公開デ
悪路もOK――変形移動ロボット「チャリべえ」公開デ
世界初の搭乗可能なハイブリッド型不整地移動ロボット「チャリべえ」の公開デモンストレーションが5月16日に行われた。4本の脚と2つの車輪を持ち、人を乗せて荒れた路面や凸凹道でも移動できるロボットだ。 3000万円のロボットが子供の手でバラバラに――ROBOT解体LIVE
3000万円のロボットが子供の手でバラバラに――ROBOT解体LIVE
未来ロボット技術研究センター(fuRo)が「ROBOT解体LIVE2004」を開催。fuRo所長の古田貴之氏が、子供たちと一緒にヒューマノイドロボット「morph3」実機を分解しながら、最先端の技術を盛り込んだ2足歩行ロボットの内部構造を紹介した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PR


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。