ロボットを携えた“国際救助隊”、「IRS-U」の訓練に密着:っぽいかもしれない(3/3 ページ)
幸い、要救助者はいなかったようだ。ロボットはボンベに近づき、その外見や、液体が漏れていないかなどの状態をチェック。そして、ロボットはその位置で停止。ボンベの監視をし続けるのだ。

 ボンベに近づいたACROSと、コンソールに表示されたカメラの画像
ボンベに近づいたACROSと、コンソールに表示されたカメラの画像 03によるボンベの画像
03によるボンベの画像地下街の検索が終わった。情報をICタグ(かなり大きく作ってある)に書き込んで地下街の入り口扉に引っ掛ける。
 扉に引っ掛けられたタグ
扉に引っ掛けられたタグレスキュー作業は所轄消防隊へ引き継ぎ、IRS-Uは後方支援にまわる
 「IRS-Uチームはこのまま監視を継続し、所轄消防機関のバックアップに移行します」
「IRS-Uチームはこのまま監視を継続し、所轄消防機関のバックアップに移行します」以上で、訓練終了。
IRS-Uメンバーの消防隊員の人に、どうしてボランティアでこれに参加しているのかを聞いてみた。
「近い将来使われるようになるだろうものにいち早く触れてみたいということ。それに、やっぱり楽しいですから」
ボランティアをするにあたってそれが楽しいというのは美しい。
そのほかのロボット
この実証実験・想定訓練とは別に、自由実験という形で、他のロボットもデモされていた。
 電気通信大学松野研究室の「KOHGA2」。KOHGAはヘビ型ロボットなのだけど、このKOHGA2はユニットを組み替えることで、このような走行型にも変形するようになった。やはり高い走破能力を持ったロボットだ
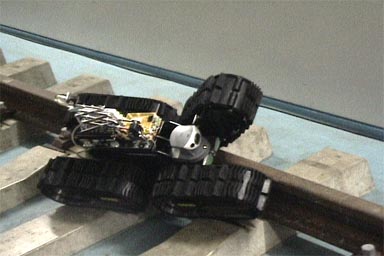
電気通信大学松野研究室の「KOHGA2」。KOHGAはヘビ型ロボットなのだけど、このKOHGA2はユニットを組み替えることで、このような走行型にも変形するようになった。やはり高い走破能力を持ったロボットだ 同じく電気通信大学松野研究室の「FUMA」。車輪型でありながら、このくらいの段差は平気で越えられる能力をもっている。日本SGIから発売されている走行ロボットプラットフォーム「BlackShip」の原型になったロボットでもある
同じく電気通信大学松野研究室の「FUMA」。車輪型でありながら、このくらいの段差は平気で越えられる能力をもっている。日本SGIから発売されている走行ロボットプラットフォーム「BlackShip」の原型になったロボットでもある 東京工業大学広瀬研究室の「Helios Carrier」。いくつもの大学の技術が結集したもので、いまのところIRSの集大成的なロボットだ
東京工業大学広瀬研究室の「Helios Carrier」。いくつもの大学の技術が結集したもので、いまのところIRSの集大成的なロボットだ文部科学省は2002年から5カ年計画の「大都市大震災軽減化特別プロジェクト」(大大特)を実施しており、今年が最終年になる。これは、「首都圏や京阪神などの大都市圏において、大地震が発生した際の人的・物的被害を大幅に軽減するための科学的・技術基盤を確立することを目的とした研究開発」であり、大きく分けて4つ、細かく分けると7つのテーマについての研究開発を行うものだ。IRSは、このうちの「レスキューロボット等次世代防災基盤技術の開発」研究の中核機関として位置付けらている。
IRCは最初の2年は個別の要素技術の研究、その後はそれらを統合した技術の研究という風に進んで来た。そして最終年の今年には、とにかく使えるところまでやってきたのである。そして、大大特プロジェクト終了後も、IRCは存続し、さらに使えるものの開発研究を目指して行くそうである。
関連記事
 レスキューロボット「Hibiscus」を操縦してきました
レスキューロボット「Hibiscus」を操縦してきました
千葉工業大学の未来ロボット技術研究センター(fuRo)の新しいレスキューロボット「Hibiscus」の発表会に行ってきた。速報は掲載済みなので、こちらではもうすこし詳しい話を動画とともに紹介しよう。それに、ちょっと操縦もさせてもらったのだ。 fuRo、新型レスキューロボット「Hibiscus」を披露
fuRo、新型レスキューロボット「Hibiscus」を披露
千葉工業大学未来ロボット技術研究センター(fuRo)の小柳栄次副所長と吉田研究員の開発チームは6月5日、瓦礫の上を安定して走行できる新型レスキューロボット「Hibiscus」を公開した。- 日本SGIと電通大、Windows PCで操作するレスキューロボット開発
日本SGIは4月28日、電気通信大学松野研究室、稲見研究室と共同で、新型レスキューロボット「FUMA」(ふうま)を開発したと発表した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PR


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。