| News | 2001年10月26日 09:11 PM 更新 |
走るロボット「ケンケン」――2050年,競走馬はロボットになる?
2足歩行ロボットの開発が盛んだが,2足“走行”ロボットというのは登場しないのだろうか? ホンダの「アシモ」が走っていたら痛快だが……。そんな願いがかなうかもれない。既に,走るロボットの開発が進められているのだ。
「2050年,ワールドカップ優勝チームとロボットがサッカーで闘う」。ご存知の方も多いと思うが,「RoboCup」のランドマーク的な目標として唱えられている言葉だ。だが,現在の2足歩行ロボットには大きな欠点がある――。歩行ロボットだけに,当たり前だがダッシュができないのだ。
ボールを追いかけ,ドリブルでサイドラインを突破する。サッカーをするには,2足“走行”ロボットを開発しなければならない。「歩くだけでも精一杯なのに」などと悲観的になってはいけない。実は,既に走行ロボットは存在してるのだ。
東京・目黒区の大岡山にある東京工業大学。大学院博士課程で制御工学を専攻する玄相昊さん(28)は,「1脚走行ロボット」の研究に取り組んでいる。「ケンケン」(RSJ2000)と名付けられたこのロボットは,最大速度2メートル/秒で走ることが可能だ。
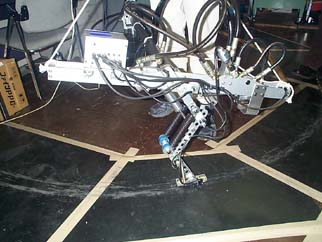 |
| ケンケンは1本足。垂直飛びもできる |
 |
| ごついアキレス腱 |
写真を見て気が付いたと思うが,ケンケンは人間の脚ではない。その名の通り,“犬の脚の動き”を再現することを目指したものである。現在開発されているのは,犬の後脚をデザインしたものだという。
ケンケンは,本体に2個のアクチュエータを装備し,腰と腿を駆動させることで走行する。ふくらはぎの部分には,2本のスプリングがあり,アキレス腱の役割を果たしている。コンピュータでは,胴体部分の「垂直速度」と「傾き」ならびに「水平速度」という3要素を制御する。
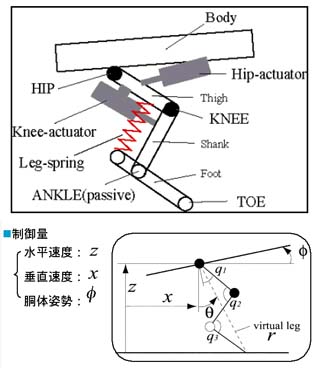 |
| ケンケンの概要図と制御システム |
「本物の犬の動きに近づくよう,できるだけ同じような機構になるように努力しました。不思議と,不具合はあまり起ないんですよ(笑)」(玄さん)。
ボーイングの油圧式アクチュエータ
「安定して走行できるのは1.5メートル/秒まで。2メートル/秒になると不安定になる」と玄さんは話すが,とにかく,ケンケンの走りは力強い。その走りを支えているのが,油圧式のアクチュエーターである。「最低でも,最近のロボットに使われている電気式アクチュエータの3倍の出力は確保できますよ」(同)。
玄さんによれば,ケンケンの開発には構想期間を含め3年半を要した。開発費用はトータルで1000万円近くなったという。そして,予算の多くが,油圧式アクチュエータ部分に割かれた。何しろ,このアクチュエータはボーイングが航空機のフラッパー制御用に使っているものと同等の仕様という代物である。
一方で,油圧式アクチュエータを採用したことのデメリットもある。玄さん自身はそれほど気にしていないようだが,ケンケンの本体には何本もホースがつながれている。アクチュエーターに油を送るポンプを外部に持つため,ホースが必要になるのだ。「自立型を期待する声はよく聞かれます。ただ,それは本質的な問題ではないんです」(玄さん)。
というのも,ケンケンに油圧ポンプを搭載することも可能だからだ。「高回転モータを使えば出力も上がります。エンジンと水素燃料を使うとか,いろいろアイデアはあるけれど,そのためにはたくさんお金が必要になります……。それに,大学の研究室だけでできるものではないですね(苦笑)」(玄さん)。
 |
| 油圧アクチュエータを駆動させるためのホースがつながれている。手前のパイプは,便宜的につけているもので,「本体に左右のバランスを制御するアクチュエータを装備すれば,棒は外せる」(玄さん)とのこと |
 |
| こちらが電動ポンプ |
MITに勝て!
当然,ケンケンの今後の展開としては,足の数を増やしていくことになる。まずは,後脚が2本のタイプを作り,続いて前脚を開発する予定だという。最終的には4本脚で疾走するはずだ。
「後脚だけのタイプはそれほど難しくないです。問題は前脚ですが,だいたいの設計はもう考えてあります。後は,ケンケンに学習機能を搭載したいですね。現状,安定して走れるようコンピュータで制御していますが,走行を繰り返すうちに,自分でベストな走行方法を学ぶようにしたい」(玄さん)。
さらに続ける。
「実は,2本足で走るヒューマノイドロボットよりも,4本足で走るロボットのほうが難しいんですよ。というのも,馬が最高速で走るときの“ギャロップ”という動きの仕組みはまだ解明されていませんからね(笑)」
 |
| ケンケンを研究する玄さんと,修士課程の上条敏さん。「研究に協力してくれる企業の方と,ぜひお話がしたい」とのこと。問い合わせは,sangho@ctrl.titech.ac.jpまで |
米国のMIT LegLabでは,20年以上も前から走行するロボットの開発が行われている。ケンケンの研究も「LegLabに勝てるものを作れ」という教授の一言で始まったものだという。玄さんは,「LegLabに追いつくまでケンケンの研究を続けたい」と意気込みを語る。ちなみに,玄さんが熱い視線を送っているのは,MITの「Quadruped」や「Unidro」と呼ばれるロボットだ。
2050年,人間とロボットはサッカーをできるのだろうか? ケンケンを見る限り,武豊がロボット競走馬でG1を制する日のほうが,早いような気がしてくる。
関連リンク
![]() ケンケンのホームページ
ケンケンのホームページ
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。