| News | 2003年5月23日 07:49 PM 更新 |
ロボットシミュレーションで多品種少量生産時代を生き残れ
次々と登場する新技術に対応し、常に差別化を求められ、ますます短命になる現代の工業製品。ビジネスの成否は、新機種の生産ラインをいかにして早く、問題なく立ち上げられるか、にかかっている。この生産現場で威力を発揮するのが、ラインの動きを事前にシミュレートできる「ロボットシミュレーションシステム」だ
日本テクノマティックスは4月に発表したロボットシミュレーションシステム「ROBCAD/PAINT-PC」「ROBCAD/ARC-PC」の開発/生産技術者向け製品説明会を5月23日に、東京で開催した。

ROBCAD/PAINT-PC
ROBCAD/ARCーPC
ロボットシミュレーションと聞くと、最近注目を集めている「パートナーロボット」「コンパニオンロボット」をイメージするかもしれない。しかし、ここでいうロボットとは、生産ラインで使われるFAロボット。自動車工場で溶接や塗装を行う1本アームの機械、といえばすぐに分かるだろう。
工場現場における「ロボットシミュレーション」は、ロボットそのものの改良より、生産効率を高めるために、ロボットの配置や資材や生成物との位置関係といった、ラインレイアウトの改良が一番の課題となっている。
製品寿命の短い現代では初期ロットから大量に製品を投入する必要がある。そのため、少数生産の試作量産段階でラインのチューニングを行っていた昔と違い、最初に設置した生産ラインのレイアウトで、トラブルなく大量生産に対応できることが要求されている。
このような、即時大量生産に対応するため、ロボットを含めた生産ラインレイアウトの事前シミュレーションが重要になってきている。初期生産にどれだけトラブルを回避できるかで、初期ロット生産数、ひいては製品ビジネスの可否に大きく影響してくるのだ。
生産ラインのレイアウトデザインは、従来経験則に従って行われ、試作段階の動作チェックで干渉問題などを抽出していた。しかし、ROBCADシリーズの導入で、事前設計の段階から正確なレイアウトデザインが短期間で行えるようになる。
ROBCAD/PAINT-PCは塗装ロボットの作業シミュレーションを、ROBCAD/ARC-PCはアーク溶接ロボットの作業シミュレーションをそれぞれ行う。
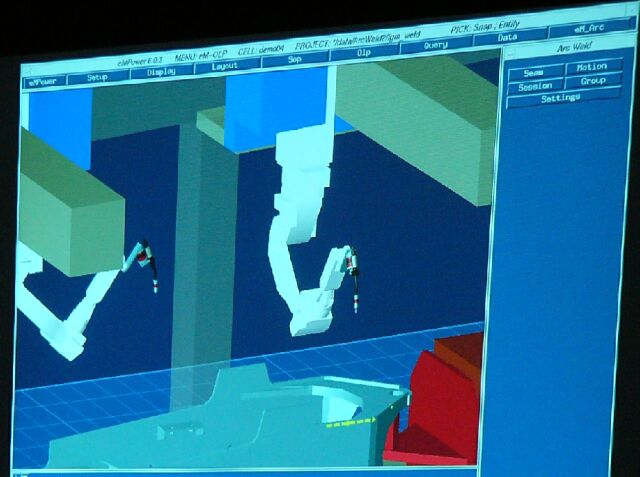
どちらも最初のフローでは、ロボット、移動経路、生成物のオブジェクトを仮想工場にレイアウトし、それぞれのオブジェクトの動作をシミュレートして、動作時における干渉を検出する。
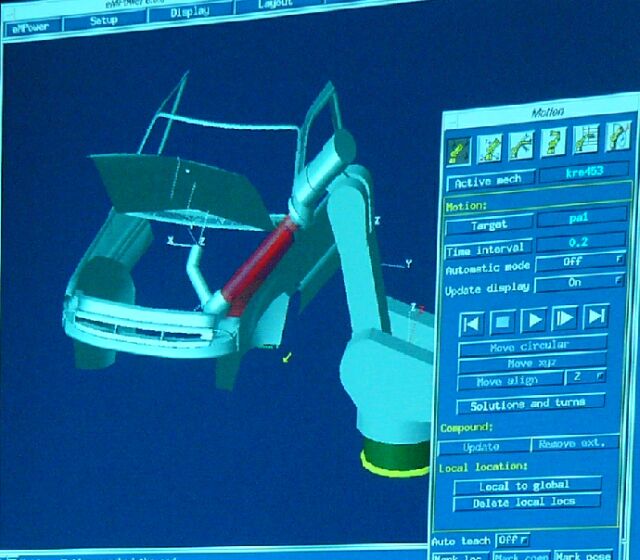
ROBCAD/PAINT-PCで、アームの動きと生成物(この場合は車のボディ)の干渉を検出する。このケースでは、エンジンルームの塗装作業でアームがシボディの左側面と干渉している(画面で赤く表示されている)。従来は経験則と試作段階の実機動作で判明していた細かい部分の動作干渉も、シミュレーションで事前に判明できるようになった

ROBCAD/ARC-PCは、アーク溶接用アームの動きをシミュレートし、設定した溶接面にロボットのアーム(またはトーチ)がアクセスできるか事前に確かめられる。入力因子として設定できるのは、ベース面とサイド面、溶接のスタートと補完点、終了点の位置など。溶接部材のポジショナーの1軸と、溶接ロボットを動かすガントリーの3軸の角度と位置を指定すると、シミュレートされたそれぞれの動きがアニメーションで表示され、動作時の干渉、アームがアクセスできないポイントが赤く示される
干渉が発生すると、次のフローで干渉しないオブジェクト位置の割り出しが行われる。このとき、マニュアルで試行錯誤して最適化するほかに、変更可能範囲を指定した上で、ROBCADに最適位置を自動で計算させる方法も用意されている。
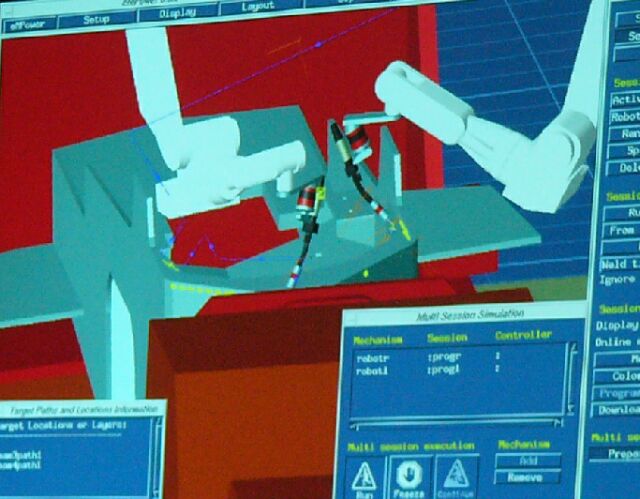
2台のロボットが稼動する現場では、それぞれの動きが干渉しあう状況も考えられる。この場合、動作タイミングをずらして干渉を避けるが、このタイミングのずれを最適化する「インターロック機能」もROBCADはサポートしている。
また、ROBCAD/PAINT-PCではペイントデータベース機能をサポートしており、実験から得られた塗装の膜圧値をテーブルとして蓄積できるようになっている。これに、塗装ロボットの吐出量やヘッドのスプレー形状、ラインの動作速度やヘッドから塗装面までの距離を入力すれば、生産ラインにおける膜圧シミュレーションを実行できる。
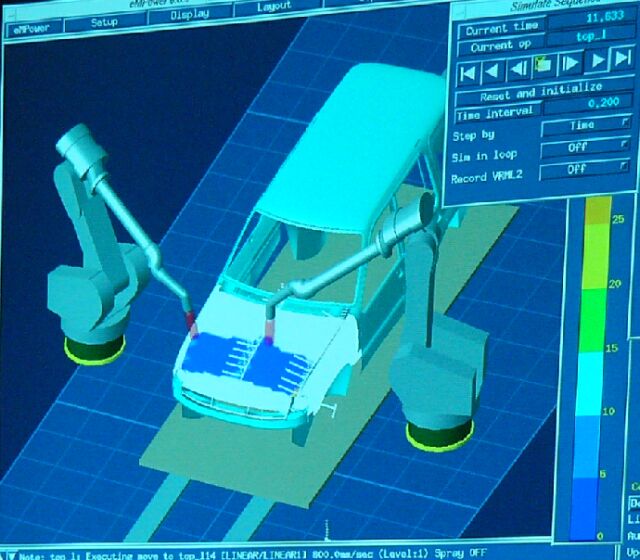
ラインレイアウトは塗装時の膜圧にも影響する。シミュレート画面では、膜圧が色で表示される
ロボットアームの動きに関するデータは、市販されている製品の計測データをライブラリとして持っている。ライブラリの種類は塗装用ロボットで5メーカー9機種、アーク溶接用ロボットで5メーカー6機種。このライブラリの存在がROBCADの最も大きな特徴でもある。
ROBCADシリーズは、すでにUNIXベースのパッケージが市販されていたが、ROBCAD-PCはこれをWindows XP/2000に対応させたもの。ソースコードはUNIX版と共通になっており、「UNIX版でサポートする機能はPC版でも同様」(日本テクノマティックス)となっている。
ロボットアームのライブラリラインナップもPC版とUNIX版は共通。ただし、こちらはユーザーから要求されたロボットアームのライブラリデータを、その都度PC版にコンバートしてから提供される。
なお説明会では、ROBCADシリーズの次期製品として、レーザ溶接に対応したバージョンが明らかにされた。ただし発売時期は未定。日本テクノマティックスによると、レーザ溶接ロボットのライブラリを作成するための調査終了を待ってリリースする予定になっている。
関連リンク
[長浜和也, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。