| News | 2003年8月8日 11:37 PM 更新 |
多自由度を実現する「超音波モーター」でロボットの体重は軽くなる
「大型で強い」台風10号が接近しつつある東京で、「レスキューロボット開発拠点」がまた一つスタートした。文字通り「風雲急を告げる」状況下での幕開けとなったわけだが、いきなり「出動!」とならないよう祈るばかりだ。
JFE都市開発は8月8日、川崎市の臨海部に開設したテクノパーク「THINK」に入居する「ロボットベンチャー」企業作業棟「THINK未来工房」の開所式と、THINK未来工房で今年行われる「ロボットチャレンジ共同研究開発プロジェクト」の発表を行った。
THINKは「Techno Hub INnovation Kawasaki」の略称が示すように、「サイエンスシティ川崎戦略会議」プロジェクトの一環として川崎市の臨海部にあるJFE事業所敷地内に設けられた、産学連携共同研究を支援するテクノパーク。先日行われた「レスキューロボット・デモンストレーション」で注目されたNPO国際レスキューシステム研究機構も、THINK内に設置されている「川崎ラボラトリー」に入居している。
THINKの敷地面積は約9ヘクタール。JFEが使用してきた既存施設をそのまま利用できるようになっており、オフィスや研究室として使える京浜ビル(延床面積1万8000平方メートル)、クリーンルームや実験室が用意されているR&D施設群(延床面積1万6000平方メートル)などがある。
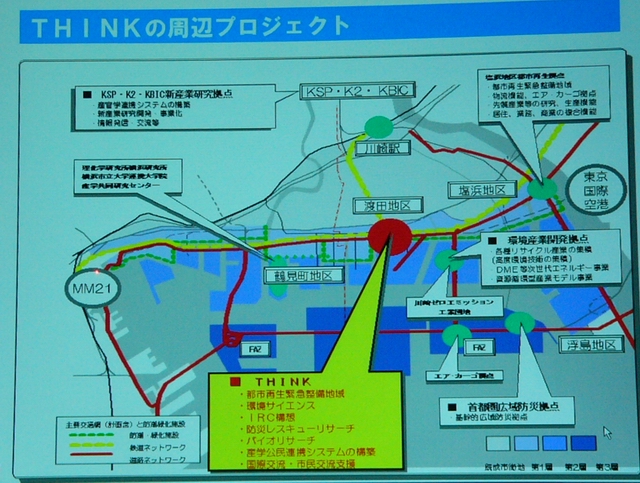

THINKの周辺地図(上)とTHINK内の施設配置(下)。事務所棟、研究実験棟以外に、製鉄所らしく「大型実験施設群」も用意されている。現在はJFE技研が使用している
JFE都市開発の藤森隆氏(都市開発研究所 所長)は、THINKテクノパークの特徴として「市街地、MM21などのビジネス施設、京浜地区工業団地、KSPなどの研究開発機関、そして羽田空港。あらゆる施設に隣接しているTHINKはあらゆるものと連携をとりやすい」と、「地の利」における優位性をアピールしている。

このほかTHINKのメリットとして紹介されたのが「充実した研究開発支援機能」(藤森氏)。技術情報ライブラリーやデータベースの利用、経営コンサルティングをはじめ、ベンチャーでは保有が難しいスーパーコンピュータを使った解析実験、人手がかかる特許申請やドキュメント作成などを、THINKが支援してくれる
ベンチャー企業が入居する「THINK未来工房」は、先に紹介した国際レスキューシステム研究機構が入居する川崎ラボラトリーのちょうど向かいに位置する。川崎ラボラトリーはJFEの体育館を再利用しているが、THINK未来工房もJFE福利厚生施設を再利用したもの。
既存施設の有効利用によるコスト削減のためだが、組み込まれていた機材を取り除いて壁などにできた穴などは、「昔の風合いを残すため、わざと従来からある周りの素材と色やデザインを合わせて修復している」(藤森氏)と、細かい工夫を見せている。


開所式時点で作業を開始しているのは、「アリエス」1社のみで、内部はほとんどガランとしている状態。壁の所々に穴を塞いだ形跡があるが、デザインはわざと周辺に合わせているそうだ
開所式で発表された共同研究開発プロジェクトのテーマは、お向かいの国際レスキューシステムに関連したもので、名称は「位置情報フィードバックが可能な多自由度モータに関する研究開発」。
ロボットのアクチュエータ関連技術の研究で、東京農工大学の遠山茂樹氏(工学部機械システム工学科教授)がリーダーを務め、ロボット関連ベンチャーの「ダブル技研」「キュー・アイ」「シリコンロボティックス」が分業で開発にあたる。
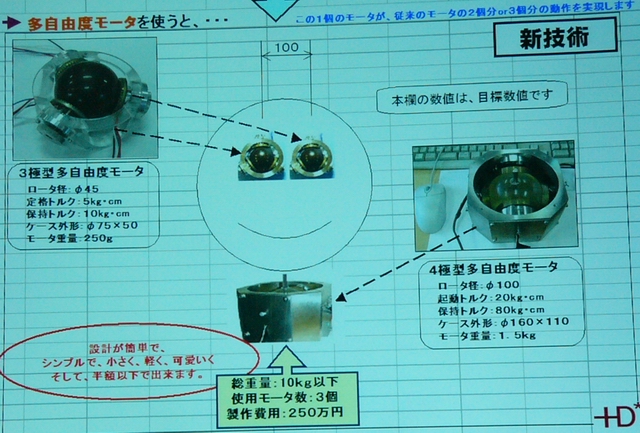
研究のメインテーマになるのは、多自由度モーターを実現する「超音波モーター」。これは現在実現が困難な低速運動高トルクを可能にするモーターで、球状の「ロータ」を円盤状の「ステータ」を複数使って駆動する。複数のステータを使うことで、一つのモーターで複数軸の自由度を実現できるのが、超音波モーターの最大の特徴だ。
これまでのモーターでは一つのモーターで1軸分の自由度しか実現できず、関節などで2自由度を得るためには、関節ごとにモーターが2台必要になり、ロボットは重く、かつ高価格になっていた。
しかし、一つのモーターで多自由度を実現できる超音波モーターを採用すれば、動きが複雑なロボットほど搭載するモーターの数が減り、軽量化とコストダウンが実現することになる。
現在、超音波モーターが抱えている問題点は、トルク力の不足と軸制御の精度が低いこと。今回発表されたプロジェクトの目的は、いま挙げた問題点を解決することにある。このモーターを長年開発してきたダブル技研代表取締役の和田博氏は2005年度までの開発期間で「トルク力は1桁以上の向上を目指す」と説明している。
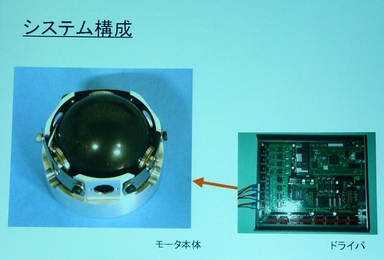
超音波モーターの駆動部(左)と、制御ユニットのドライブ部(右)。トラックボールのような形状をしている駆動部のボールの周りには、円盤状のステータが押し当てられている。このステータが回転して、ボールの部分を動かす仕組みになっている。

従来型モーターを利用したロボット(上)と、超音波モーターを利用したロボット(下)。どちらも同じ動きをするが、従来型はモーター6基必要なところを、超音波モーターでは半分の3台で済ませている
関連記事
関連リンク
[長浜和也, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。