遠隔地に“触覚”を伝える新技術、大成建設がベンチャーと共同開発:情報化施工
大成建設は、力触覚提示デバイスの開発などを行うイクシーと共同で、力触覚伝達技術を利用した遠隔操作システムの開発に着手した。特殊なグローブで遠隔操作したロボットアームが感じた触覚情報を操縦者に伝えられるシステムを構築し、微細な手作業をロボットアームで行えるようにする。
大成建設はこのほど力触覚提示デバイス開発を手掛けるベンチャー企業のexiii(イクシー)と共同で、力触覚伝達技術を利用した遠隔操作システムの開発に着手したと発表した。視覚や聴覚と同じように、物体の硬さ・軟らかさなどの触覚や、物体を扱う際の力加減の情報を双方向に伝達できるシステムの開発を目指すという。2017年度中にプロトタイプの完成、2018年度にシステムの実用化を目指す。
現在、生産施設ではさまざまな自動化ロボットや装置が導入され、多くの生産工程で高効率化が図られている。一方で、まだまだ人の手に頼らざるを得ない労働集約型作業も残っている。これらの課題解決には、特定用途ごとに自動化ロボットや装置を開発して対応する方法もあるが、作業員による手作業、特に力加減の再現は現在のロボットでは対応が困難で、再現するための技術開発には相当のコストと期間が必要となるという。
そこで両社は、開発コストや期間を極力抑えられるよう共同で、これまでバーチャルリアリティや医療分野などへの適用が検討されていた力触覚伝達技術を利用し、インターネットを介して遠隔地でも対象物の硬さ、軟らかさを感じながら操作し、そのデータを蓄積・学習して、ロボットなどが自ら作業することができる技術の開発を開始した。2017年6月からイクシーが開発した5指ハンドを備えたロボットアームと、力触覚グローブ「EXOS」を組み合わせたシステム構築に着手している。
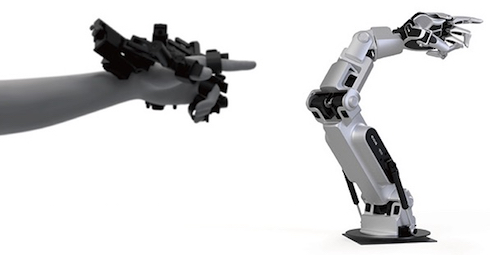 イクシーが開発した力触覚グローブ「EXOS」 出典:イクシー
イクシーが開発した力触覚グローブ「EXOS」 出典:イクシー今後、開発を目指す内容は以下の通り。
- 遠隔操作による物体把持などの「力加減」を現場にフィードバックする技術
- ヘッドマウントディスプレイなどで実映像を確認しながら、正確に遠隔操作を行う技術
- 操作データ(作業手順、作業時実映像、力加減など)の保存・蓄積
- 操作データの分析・編集・再生による作業パターンの最適化
- 人工知能を活用した学習済みモデルの構築
- 次世代高速通信規格(5G)への対応
同システムを導入することで、インターネットを介した遠隔操作により、時間・場所を問わず作業が可能となり、労働集約型作業に対して多様なパターンでの適用が期待される。また、作業員が立ち入れない環境下で力加減を伴う遠隔操作が可能となる他、操作データの蓄積・学習済みモデルに基づきロボットの自己判断による作業ができるようになる見込みだ。さらに熟練作業員の動作を記録・編集することで、効率的な技術の蓄積が期待される。これらの効果により、生産性が向上し、コスト削減も見込まれるとする。
両社は力触覚伝達技術を多目的な用途に展開可能な重要技術と捉え、今後はまず生産施設向けに同システムの実用化を図り、食品製造工場、医薬品製造工場などへの提案を進める。さらに、医療・福祉施設、物流施設、集客施設など多目的用途への適用や、建築・土木現場などの広範な作業への応用も検討する。
関連記事
 200kgの鉄筋を楽々運べる巨大な“ロボット右手”、作業人数を半分に
200kgの鉄筋を楽々運べる巨大な“ロボット右手”、作業人数を半分に
清水建設、アクティブリンク、エスシー・マシーナリの3社は、重量鉄筋の配筋作業をアシストするロボットアーム型の作業支援ロボット「配筋アシストロボ」を共同開発した。 柱鉄骨の溶接をロボットで自動化、2017年度に本格導入
柱鉄骨の溶接をロボットで自動化、2017年度に本格導入
人手不足が懸念され、省人化や効率化が課題となっている建設現場。その解決方法の1つとして注目されているのがロボットの活用だ。大成建設は小型のロボットを使った柱鉄骨の現場溶接自動化工法を開発した。複雑な形状の部位でもロボットが形状変化を判断して連続して溶接できるロボットで、大幅な効率化が図れるという。 「すごい目」のロボットで橋梁点検を効率化、0.1mmの亀裂も捉える
「すごい目」のロボットで橋梁点検を効率化、0.1mmの亀裂も捉える
NEDOプロジェクトで橋梁点検ロボットの開発を進めているイクシスリサーチは、神奈川県川崎市内にある道路橋で、実証試験の様子を公開した。主桁下フランジにつり下げるロボットで、ステレオカメラを使ってクラックや鋼材の腐食などを高精度に確認できる。目視で行われている橋梁点検作業の効率化に貢献するロボットとして早期の実用化を目指す方針だ。
Copyright © ITmedia, Inc. All Rights Reserved.





人気記事トップ10
- 大林組が見据えるデジタル戦略の現在と未来 BIM生産基盤による“生産DX”
- 建設業の24%で「2024年度は減収減益」の見通し 下振れ材料は人手不足の深刻化
- 永平寺と清水建設が重要文化財19棟のデジタルツイン制作
- AIが屋内環境を予測し「先回り」で空調制御 大規模オフィスビル5棟に導入、NTT都市開発
- 「i-Construction2.0」を国交省が発表、2040年に建設現場の生産性1.5倍へ
- 建設業がBIMで目指すべき“サステナビリティ”への道 世界最古の規格協会BSIが提言
- ドローンで取得した画像から3D点群/3Dモデルを自動生成、AIアプリ開発プラットフォームの新機能
- 建築会社で朝6時からの時差通勤制度開始、朝方勤務者に手当も オープンハウス・アーキテクト
- ものづくりにあこがれるBUILT記者、電気工事士の資格取得を目指す
- BIM確認申請で欠かせない「オープンBIM」と「CDE」 オープンBIM時代の到来で“建築/都市DX”実現へ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。