| News丗僯儏乕僗懍曬 | 2001擭7寧13擔丂12:14 峏怴 |
崌懱曄宍偡傞塅拡儘儃丆僨價儏乕丂嶻嬈憤尋
丂嶻嬈媄弍憤崌尋媶強乮撈棫峴惌朄恖乯偼7寧12擔丆崌懱丒曄宍偱偒傞儌僕儏乕儖宆儘儃僢僩傪奐敪偟偨偲敪昞偟偨丅塅拡嬻娫側偳婋尟側応強偱偺嶌嬈傊偺墳梡傪峫偊偰偄傞丅
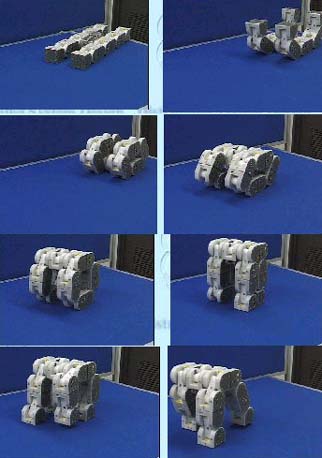
丂暋悢偺儌僕儏乕儖傪乬崌懱乭偝偣傞偙偲偱丆廃埻偺娐嫬偵墳偠偰曄宍偟丆堏摦傗嶌嬈傪峴偆偙偲偑偱偒傞夋婜揑側儘儃僢僩丅儌僕儏乕儖1偮傪6屄偺拝扙柺偲2屄偺夞揮嬱摦晹偺傒偲僔儞僾儖側峔憿偲偟丆拝扙婡峔偼帴愇偲宍忬婰壇崌嬥傾僋僠儏僄乕僞傪慻傒崌傢偣偰寉検壔偡傞側偳偺岺晇傪巤偟丆儌僕儏乕儖1屄摉偨傝偺帺桼搙偼彮側偄側偑傜丆暋悢儌僕儏乕儖傪崌懱偝偣偨婡摦揑側摦偒傪壜擻偵偟偨丅儌僕儏乕儖9屄傪慻傒崌傢偣丆僋儘乕儔乕宆儘儃僢僩偐傜4媟宆儘儃僢僩偵傕曄宍偱偒傞丅
丂嶻嬈媄弍憤尋抦擻僔僗僥儉尋媶晹栧偺暘嶶僔僗僥儉僨僓僀儞尋媶僌儖乕僾偲搶嫗岺嬈戝妛戝妛堾憤崌棟岺妛尋媶壢偺懞揷抭彆嫵庼偑嫟摨奐敪偟偨丅崱夞偺儘儃僢僩偺惉岟偱丆乽娐嫬偵揔墳偟偰偡偽傗偔曄宍壜擻側怴偟偄僞僀僾偺3師尦儌僕儏乕儖宆儘儃僢僩偺壜擻惈偑帵偣偨乿偲偟丆崱屻偼奺儌僕儏乕儖偑帺棩揑偵摦嶌傪寛傔傞暘嶶惂屼傪幚尰偡傞偺偑栚昗丅榝惎扵嵏儘儃僢僩傗媬彆儘儃僢僩側偳傊偺墳梡傪恾傞丅
娭楢儕儞僋
![]() 僯儏乕僗儕儕乕僗乮曄宍僔乕儞偺儉乕價乕晅偒乯
僯儏乕僗儕儕乕僗乮曄宍僔乕儞偺儉乕價乕晅偒乯
[ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅