| News | 2002年4月1日 07:35 PM 更新 |
ソニー,走る「Running AIBO」を開発中
ROBODEX2002のトークショーで,ソニーが開発中の走るAIBOの映像が公開された。詳細はまだ明らかにされていないが,走るAIBOが発売される日もそう遠くはない?
パートナーロボット博覧会「ROBODEX2002」で3月30日,「走るAIBOは可能か? 先進のシミュレーション技術が生み出す走行ロボット」と題したトークショーが行われ,その中で,ソニーデジタルクリーチャーズラボならびに米Boston Dynamicsが開発中の「Running AIBO」の映像が公開された。

これが「Running AIBO」の試作機。スペースの都合上,電源は外部供給となっている。頭部以外は,AIBOとは全く別物。サイズはそれほど大きく見えない
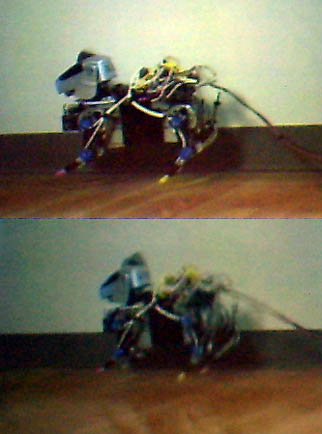
Running AIBOの走行シーン。初代AIBO「ERS-110」ヘッドユニットの耳が激しく揺れている。4本の脚が全て,地面から離れているのが分かる
Running AIBOは,「現行のAIBOの10倍のスピードで移動することが可能」(ソニーデジタルクリーチャズラボの山本隆司氏)。走り方は,「バウンス」と呼ばれるパターン。前脚2本,後脚2本がそれぞれセットになって,交互に地面を蹴る。見た目は,本物の犬のようというほどではないが,山本氏は「まだまだ課題は多いが,走らせるところまでは到達した」と研究成果をアピールする。
「単純な意見として,パワーを大きくすればいいのではないかと言われるが,それだと,バッテリーを大食いするので,それを補うためにバッテリーも大きくしなければならない。結局,重量増による出力のさらなるアップと悪循環になる。(Running AIBOでは)重さや脚の長さ,バネの強さなどを計算してシミュレーションを行い,最適な設定になっている」(山本氏)。
なお,ソニーデジタルクリーチャーズラボと共同研究を行っているBoston DynamicsのMarc Reibert社長は,マサチューセッツ工科大学(MIT)Leg Laboratoryで走行ロボットの研究開発を行っていた権威。この日のトークショーでは「富士山に登れる2足歩行ロボットを作りたい」と夢を語った。
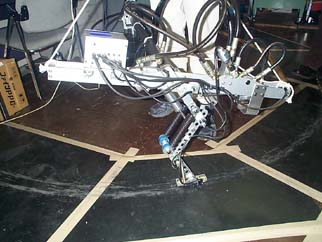
こちらは,東京工業大学大学院の玄相昊さんなどが開発している1脚走行ロボット「ケンケン」。弦さんは,Raibert社長がMIT時代に開発した走行ロボットを目標にしている
関連記事
![]() 走るロボット「ケンケン」――2050年,競走馬はロボットになる?
走るロボット「ケンケン」――2050年,競走馬はロボットになる?
![]() ROBODEX2002特集ページ
ROBODEX2002特集ページ
関連リンク
![]() 米Boston Dynamics
米Boston Dynamics
![]() MIT Leg Laboratory
MIT Leg Laboratory
![]() ソニー
ソニー
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。