| News | 2002年12月13日 01:48 PM 更新 |
っぽいかもしれない
出渕裕デザインのインパクト〜ヒューマノイドロボット「Promet」登場(1/4)
「機動警察パトレイバー」をほうふつさせる出渕裕デザインのヒューマノイド「Promet」の発表会に行ってきた。デモシーンの動画を含めて、たっぷり楽しんでいただこう
関東地方に雪が降った12月9日、なかでも雪の強かった宇都宮市に行ってきた。市の郊外にある川田工業で、ヒューマノイドロボット「HRP-2」の最終成果機の発表があったからである。
HRP-2は、産業技術研究所知能システム研究部門ヒューマノイド研究グループ(全体仕様設計)、安川電機(腕部仕様設計)、清水建設(視覚部仕様設計)、それに川田工業(主担当、設計制作)とによる共同プロジェクトによるロボットだ(*1)。正確に言うと、プロジェクトの名称が「HRP(Humanoid Robot Project)」で、その第2世代にあたるロボットの最終成果機が「HRP-2」というわけ(*2)。
プロジェクトは1998年からの5カ年計画で、今年が最終年度になる。目的とするのは「人間協調・共存型ロボットシステムの研究」。つまり人間と一緒に働けるロボットを考えようというもの(12月10日の記事参照)。
HRP-2の最終イメージは、建築現場みたいな足元が平らじゃないところで、パネルなどを「はい、そっち持って。こっちこっち。いいよ、そこに立てかけて」っていう具合に、人間と一緒に作業するということだ。これは、かなり大変である。まず、不整地歩行、音声認識ができなきゃいけない。さらに、人間と一緒にパネルを運ぶときには、人間がどっちに行きたいのかを認識して、そっちについていくということができなきゃいけない。
“出渕デザイン”で登場
見た人もいるかもしれないけど、この最終成果機の前、今年の2月にプロトタイプ(HRP-2P)が発表されている。3月に横浜で開かれたROBODEX2002にいて、人間と一緒に机を運んでいたやつだ。つまり、この時点で「一緒に机を運ぶ」ことはできていたのだ。人間の行く方向についていくというのは、腕にしこまれた圧力センサーで、持っているもの(この場合机)が、どっちに押されるか引っ張られるかを調べて、そっちに歩いていくという方法で実現していた。

性能的には、ここから大きくは変わっていない(ソフトウェア的には、プロトタイプでできたことが、最終成果機にはまだ組み込まれていないものもある)。じゃあ何が変わったのかというと、外観だ。
ROBODEX2002でプロトタイプを見た人は、その脇に「出渕裕(いづぶちゆたか)による外観デザイン図」があったのを覚えているだろう。
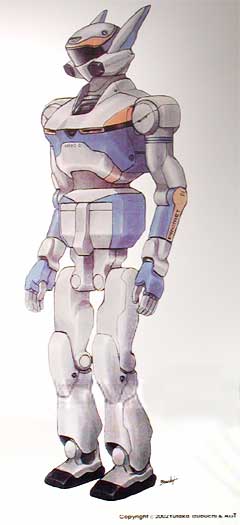
(Copyright 2002Yutaka Izubuchi & AIST)
でも、プロトタイプはまだそこまで手が回っていない。わたしも、ぜんぜん出渕メカじゃないじゃんって思わず言っちゃった。それが、今回は実現したっていうんである。これだ。

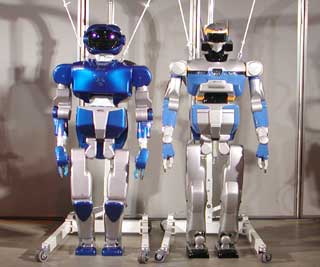
出渕裕さんをして「よくもまぁここまで」で言わしめた忠実さだ。さすがに関節周りなどは、機構上、デザインが制約を受けるところがあるけど、頭なんて、おもいっきりそれだ(*3)。プロトタイプと並べるとこんなに違う。
*1 川田工業にはisamuというロボットもあるのだけど()、HRP-2とこれとは全く別個のプロジェクトだ。2つのロボットプロジェクトに並行して関っているのだ。
*2 最終成果というわけだから、これを研究機関向けにレンタルする計画はあるそうだ。価格は5年で4000万円程度。これにはソフトウェアは含まない。ソフトについては、完全に内部APIを公開し、誰でも自由にこのプラットフォームでの開発ができるようにする。ハードウェアの仕様についても、同様に公開するつもりだけど、特許関係の部分でまだ決まっていないところもあるそうだ。
*3 やっぱり思い出すのは、「機動警察パトレイバー」(ゆうきまさみ)のイングラムだ。出渕さんによれば「私のところに依頼があったということは、パトレイバーを作れっていうことでしょうから、開き直ってやりました」だそうだ。
[こばやしゆたか, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
前のページ | 1/4 | 次のページ
![]()
ITmediaはアイティメディア株式会社の登録商標です。