| News:ニュース速報 | 2003年3月27日 09:15 PM 更新 |
富士通研、ニューラルネットでロボットの動作学習に成功
富士通研究所は3月27日、構成が動的に変化するニューラルネットワークを使用し、ヒューマノイドロボットの動作学習を効率的に行えるシステムの開発に世界で初めて成功したと発表した。富士通オートメーションの「HOAP-02」に搭載される(関連記事を参照)。
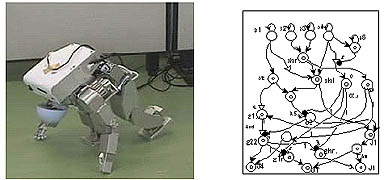
新システムによる起き上がり動作とニューラルネットワーク
ヒューマノイドロボットの制御や動作生成には複雑な力学計算が必要なため、ロボットが実際に使用される場面や状況に臨機応変に対応するには高速なコンピュータが必要とされる。そこで生物の神経網を数学的にモデル化したニューラルネットワークが注目されているが、従来のニューラルネットワークでは動作の学習に数日から数カ月の時間が必要な点が課題だった。
富士通研究所が開発したシステムでは、脊椎動物の「神経振動子」(周期的なリズムを発生する神経系)を数学的にモデル化した「Central Pattern Generator」(CPG)を基本構成単位とし、これを組み合わせたニューラルネットの状態を「数値摂動法」(Numerical Perturbation Method:NP法、非線形解を求める摂動法をコンピュータ処理するもの)で最適化する。この「CPG/NP法」と独自ソフトにより、ロボットに各種の動作を効率的に学習させることができるという。
まず初期状態のニューラルネットからロボットの動作を生成する。これをあらかじめ設定しておいた評価関数で評価し、動作の善し悪しを決定。さらにCPG間の結合係数を変えながら動作を変化させ、最適な動作が生成されるまで試みる。最適な動作をNP法を使って探し出し、ニューラルネットを必要に応じて変化させる。ネットワーク構造を変化させながら学習することで、複雑で多様な動作の学習も実現できるという。
CPG5個を使用した起き上がり動作は約20秒で、同9個の歩行動作は約50秒、同39個の階段昇降動作は約80秒で学習できたという。「ロボットが実際の環境の中で動きながら、適応的に学習していくことができる」(同社)。
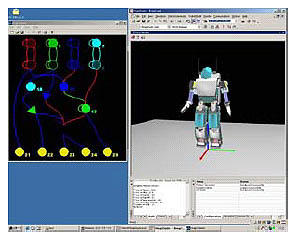
ヒューマノイド動作生成システム
同社で動作生成システムを試作し、力学の専門知識がなくても動作生成ができるようにした。ニューラルネットワークを記述するための専用プログラミング言語も開発した。システムはHOAP-2の付属ソフトとして年内に提供を開始する予定。
関連記事関連リンク
[ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。