| News | 2003年11月21日 06:57 PM 更新 |
早大とテムザックが開発した“人を載せて2足歩行するロボット”(1/2)
早稲田大学理工学部高西淳夫研究室とテムザックが、世界初の“人間を搬送する2足歩行ロボット”を開発。ロボットが歩くための脚部の仕組みに、従来の2足歩行とは違う機構を採用することで、重く不安定な人間を載せながらも安全に歩くことができるという。
早稲田大学理工学部高西淳夫研究室とテムザックは11月21日、人間を載せて動歩行ができる2足歩行ロボット「WL-16」を開発したと発表した。「人間を載せての動歩行2脚ロボットは世界初」(同研究室)。福岡県/北九州市/福岡市など行政とテムザックが開発資金面を支援し、産官学一体の取り組みで2年後の実用化を目指すという。
「“人間”を搬送する2足歩行ロボットを開発しました」――。
早大とテムザックの連名で届いた発表会の案内を見て、ZDNet編集部ではさまざまな憶測が飛び交った。
「2足歩行ロボットが2体一組になって担架で運ぶのでは?」「いや、籠をかついでの“殿様スタイル”だろう」「おばあさんを背負って歩く笹川ロボット親孝行ロボットか!」「番竜のテムザックがからんでいるから、イザというとき4本足に切り替わる仕様では?」――などなど……。
実際は、こんなのだった。

早稲田大学理工学部高西淳夫研究室とテムザックが開発した“人間を搬送できる”2足歩行ロボット「WL-16」
WL-16は、人間のカタチをしたいわゆるヒューマノイドロボットではなく、脚と腰部のみで構成されており、腰の上部にイスが取り付けられている。ここに人が座ることで、WL-16が“人間搬送2足歩行ロボット”となるのだ。WL-16のボディサイズは全高が最大1540ミリで重さは60キロ(バッテリー込み)と意外にコンパクト。人が座るとこんな感じだ。

マスコミお披露目での“座り役”の栄誉を射止めたのは、早大理工学部4年の橋本健二さん。WL-16は体重60キロの橋本さんを軽々とかついで動歩行を見せてくれた
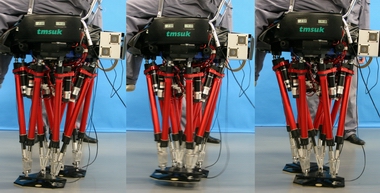
WL-16の脚部をよく見ると、見慣れた“ロボット足”とは様子が異なる。従来の2足歩行ロボットの多くは、アクチュエーターを直列に配置した「シリアルリンク機構」が一般的だった。だがWL-16は、自動車のショックアブソーバーのような直動アクチュエーターを並列に配置した「パラレルリンク機構」を採用。片足に6本のアクチュエーターが並列に連結され、伸縮するリンクが協調して動作することで6自由度(前後左右上下)の位置決めを行うという仕組みだ。

従来の2足歩行ロボットとは異なり、アクチュエーターを並列に配置した「パラレルリンク機構」
シリアルリンク機構のメリットについて高西教授は「人間の骨はシリアルリンクだが、筋肉はパラレルリンク。人間はこの両者をバランスよく使い分けて2足歩行を行っている。ロボットの場合どちらも長所と短所があるが、パラレルリンクは従来(シリアルリンク)のロボットに比べて位置精度や機構の剛性が高く、大きな力を出せるという良さがある」と語る。
パラレルリンク方式は、一般的に可動範囲が狭いという欠点が指摘されるが、WL-16の脚部は前後に1.02メートル、左右に1.36メートル、上下に0.34メートルの可動範囲があり、将来的には人間と同様に階段や坂道の昇り降りもこなせるように設計されている。また、2軸が1つに交わる「3自由度受動ジョイント」を使って、バックラッシュ(ガタつき)を最小限に抑えながら自由度を高めた。この軸受け部はヒーハイスト精工の協力による特注品だ。

パラレルリンク方式の欠点である可動範囲の狭さも、WL-16は6方向に十分な可動範囲を確保している
「人を載せるのって難しいんです」(ロボ)
[西坂真人, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
前のページ | 1/2 | 次のページ
![]()
ITmediaはアイティメディア株式会社の登録商標です。