4本脚から蛇に――「変形合体ロボ」見参(2/2 ページ)
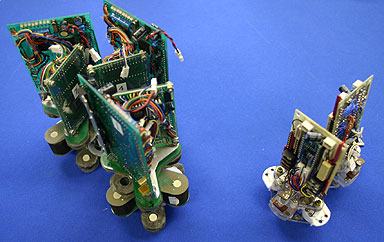
無機質なプラスチックの固まりが、複数組み合わさって1つの命になる。自律分散システムの“見える化”を目指したロボットの開発が進んでいる。
運動の仕組みはまだ自律分散とはいえない。モジュールの1つが“親”となり、他のモジュールに指令を送っている。4足歩行型に組んでやれば、親モジュールが「4足歩行型」と認識し、残りのモジュールに「君は前右脚」「君は後ろ左脚」などと動き方を指示する。
動きが生物らしいのは、生物と同じ「進化的学習」を取り入れため。ロボットの形態や環境条件をPCに設定して試行錯誤を繰り返させ、動きを獲得した。
動きの順番や変型のタイミングもあらかじめ設定しておく必要がある。前出のムービーでは「4本脚で歩き、2回ひっくり返されるとヘビ型に変形し、しばらく歩いた後、結合部をはずす」という一連の動きをPCで設定しておき、Bluetooth経由で送信して動かしている。
赤外線センサーで検知した障害物を避けたり、加速度センサーで体の傾きを検知して体勢を立て直すといった動作は、ロボット単独でも可能だ。
今後は、周囲の状況と自分の役割を各パーツが自律的に判断し、環境に応じて形や動きを変えられるようにしたり、分離したパーツ同士がお互いを探し出して自由に結合できるようにするなどして、本当の意味での自律分散システムに近づけていきたい考えだ。
将来は、周囲の地形に応じて自在に変形し、狭い場所にも簡単に入り込める災害救助ロボットや、未知の地形に対応できる惑星探査ロボットといった分野に応用したいという。
ちなみに、玩具メーカーからおもちゃとして売り出したいという話もあったというが、「高すぎてできなかった」という。1モジュールあたりの価格は約50万円。コスト削減も課題だ。

研究の変遷

フラクタムを3次元に応用したモジュール。6面から手を伸ばして隣のモジュールと結合したり、離れて回転し、別モジュールと結合したりできたが、1モジュールのサイズは子どもの頭ほど。重さも7キロと、大きすぎた。

Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
- 合体変形する宇宙ロボ,デビュー 産業総研
- デンマーク産“合体変形ロボ”は「ターミネーター」を目指す?
複数のモジュールが集まって1つのロボットになり、用途や環境に合わせて自在に形状を変える。そんな“合体変形ロボット”がデンマークで開発されていた。