| News | 2003年11月5日 11:58 PM 更新 |
目指すは“国際救助隊”――レスキューロボット研究の「今」
日本SGI主催のプライベートカンファレンスで行われた「Robot&Rescue Forum」で、NPO国際レスキューシステム研究機構が進めるロボット技術を用いた災害救助支援システムが語られた。講演会場では、ヘビ型レスキューロボットも登場。
日本SGIが11月5日から開催しているプライベートカンファレンス「SGI Solution3 Fair 2003」のソリューションフォーラム「Robot&Rescue Forum」で、NPO国際レスキューシステム研究機構(IRS)理事で電気通信大学電気通信学部知能機械工学科教授の松野文俊氏が講演を行い、IRSが進めるロボット技術を用いた災害救助について語った。

NPO国際レスキューシステム研究機構(IRS)理事の松野文俊氏
IRSは、1995年1月の阪神淡路大震災を機に神戸大学を中心に組織されたレスキューロボットの研究グループを前身としている。松野氏は大震災当時、神戸大学で宇宙ロボットの研究に携わっており、大災害を身近に体験した一人でもある。
「大震災で周囲の知人たちが被害にあう中、自分はなにも助けられなかった。当時行っていた宇宙ロボットの研究の延長で、なにか人の役に立つことはないだろうかという思いから、レスキューロボットの研究活動が始まった」(松野氏)
災害は地震など自然によるものだけでなく、まだ記憶に新しい2001年9月の米国同時多発テロをはじめ、チェルノブイリ原発事故やJCO臨界事故などといった人為災害もある。
「ニューヨークのテロでは、消防士など300人以上が建物の二次倒壊で亡くなっている。また、現代社会では放射能漏れなどの事故は避けて通れない。このような人が入っていくには危険な場所での災害支援に、ロボットが1つのソリューションになる」
災害時のロボットの役割として松野氏は、まずは情報収集を行ってそのあと助けるという「サーチ&レスキュー」が基本的な考え方と述べる。IRS松野氏のグループではまず、情報収集を行うロボットを作るという課題に取り組んでいるという。
ロボットによる情報収集に欠かせないのが、災害現場での確実な移動手段だ。従来のロボット研究で想定された「不整地」は平面に傾斜や障害物がある程度だったが、実際の災害現場では、瓦礫が散乱した場所で崩壊の危険性を考えながらの行動となる。車輪タイプはもちろん戦車のようなクローラ(キャタピラー)タイプでも、ビルのコンクリート柱が倒れた瓦礫の中を進むのは困難なほか、平らな整地をようやく歩けるようになった脚型ロボットなどは、まだ時期尚早だ。
実際には、足場の悪い不整地でも歩行できるように足先にセンサーをつけた脚型ロボットの研究も行われているという
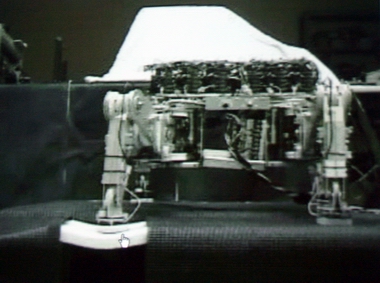
そこで注目されるのが、狭い場所にも入っていけるヘビ型ロボット。電気通信大学松野研究室と日本SGIは共同でクローラ連結型ロボット「KOHGA」を開発している。講演会場ではこのKOHGAと、2002年のRoboCupレスキューロボットコンテストに出場したリモコン戦車スタイルのロボットが紹介された。

ヘビ型ロボット「KOHGA」とリモコン戦車スタイルのロボット

関連機器すべてをスーツケース1つに収められるようになっている。「災害時に迅速に対応できることもレスキューロボットの使命」(松野氏)
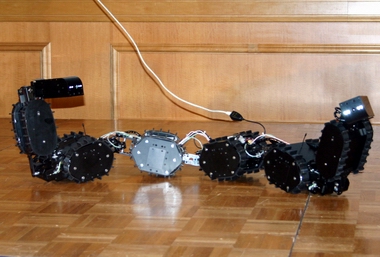
前後対象スタイルで、前と後ろの両方にカメラとライトを装備している。かま首を持ち上げて周囲の様子をカメラに収めたり、後ろのアタマ(カメラ)を持ち上げて、前側のカメラ位置や周囲の状況をモニターするといったこともできる
松野氏が所長を務めるIRS川崎ラボラトリーには、瓦礫が散乱した場所でのレスキューロボットの評価が行える広さ320平方メートルのテストフィールドが用意されており、実際の災害現場に近い環境下でレスキューロボットの研究活動が行える。
「レスキューロボットで、サンダーバードのような国際救助隊を作ろうというのが目標。レスキューはわれわれ自身の問題。産・官・学の3つだけでは防災は成り立たない。われわれ自身――つまり“民”を加えた産官学民が一体となり、自分たちの問題という認識を持って取り組むことが重要」(松野氏)
関連記事
関連リンク
[西坂真人, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。