| News | 2003年5月20日 02:33 PM 更新 |
ロボカップジャパンオープン2003観戦記
ヒューマノイド、ついに人間と戦う?(2/5)
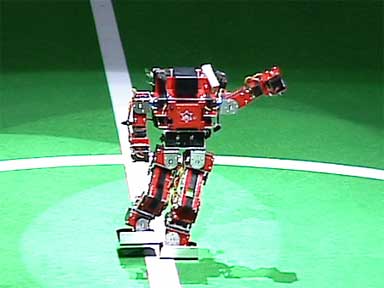
五輪の会B 「Burning Star」
五輪の会Bの宮田さんがロボットを作りだしたのは、およそ半年前。「Metallic Fighter」や「Silf-H2」などに感化されてのことだ。その「Burning Star」は最初のロボットとは思えないほどの安定性を見せる。
本人によれば、フィールドのフェルトが足に合わなくて、昨日はまだ歩くことさえできなかったそうなのだけど、はたから見ていると、とてもそうは見えない(*1)。
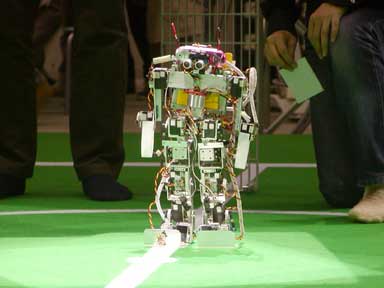
五輪の会C 「Silf-H2」
これも、ROBO-ONEでおなじみ、井藤さんの「Silf-H2」。身長25センチ、体重約700グラムという小さなロボット。本格的な2足歩行ロボットとしては世界最小という噂もある。大阪大学の浅田稔先生が個人的にとても欲しがっていた。このサイズになると、フィールドの細かなデコボコの影響が大きくなるのだけど。

Foot-Prints 「Barukii2」
ROBO-ONE組の最後は、宝塚市からの岡本さんによる「Barukii2(バルキーツー)」だ。このチームは、昨年の世界大会にも出場し、PK戦で優勝したという実績を持っている。
しかし、今回は、ハードウェアを一新してきた。ROBO-ONE用の流用ではなく、Robocup用のロボットを作成してきたのだ。カメラをはじめとするセンサーを搭載し、完全自律で動くことを目標としているのだ。完成までまだ1年かかるということで、今回は激しい動きは見られなかったが、これからに期待だ。なんといっても、後で説明するペナルティファクターがなかったのはこのロボットだけなのである。
大阪大学 「Senchans」
正確には、Senchansはチームの名前で、ロボットは「井川」あるいは「浜中」という固有名詞を持っているそうなんだけど、大会中ずっと「Senchans」って呼ばれていたので、ここでもそれにならう。
ハードウェアは、富士通のHOAP-1をベースにしている。搭載されたカメラで、ボールを自動認識し、それを処理するという能力を持っている。
ところが、大会直前に電源を内蔵させようとして、重量バランスの調製に失敗。電源の内蔵ができなかったばかりか、歩くことさえ不調になってしまった(*2)。本領が発揮できなかったのは残念。

動的にバランスを取っているらしく、片足立ち中に多少つついても倒れないというのは見事だ。
Hits dream 「Firstep」
ホンダインターナショナルテクニカルスクール(HITS)の学生によるチーム。あのホンダの系列の学校である。というわけで、ロボットは、ASIMO(初代)をベースに改良を加えたものである。顔がディスプレイになっていて、いろいろアピールしていた。

はじめの一歩でFirstep。いい名前だ。なお、このロボットが唯一の120センチクラスのものである(*3)。
ペナルティファクタ
Robocupが目標とするのは、自分で作った「完全自律」のロボットだ。でも、まだ今のヒューマノイドリーグはそこまでいっていない。そこで、出場するロボットには、完全じゃない度合によってハンディキャップがつくことになっている。
| 完全じゃない度合い | ハンディキャップ |
| Human Control(人間が操縦する) | 1.2 |
| External Power(電源が外部) | 1.2 |
| Remote Brain(CPUが外部) | 1.2 |
| Platform(市販のロボットがベース) | 1.2 |
これによって、各ロボットのペナルティファクター(PF)を計算するとこうなる。
| ロボット | 該当する項目 | PF |
| Metallic Fighter | H | 1.2 |
| Burning Star | H | 1.2 |
| Silf-H2 | H | 1.2 |
| Barukii2 | なし | 1.0 |
| Senchans | P,R,E | 1.728 |
| Firstep | G,H | 1.44 |
競技結果の数字が小さいほうが良いもの(歩行)は、結果にPFをかけたものが成績となるし、数字が大きいほうがいいもの(PK戦、フリースタイル)は、結果をPFで割ったものが成績になる。
歩行
クラス分けなしの競技。身長の5倍のところにおいてある直径20センチのポールを回って帰って来るまでの時間を測定。持ち時間20分の間に、何度トライしてもかまわない。最も速かったものが成績となる。途中で人間が触ったら(転んだのを起こすとかが入ったら)、20秒加算だ。
*1 宮田さんのサイトは必見。ロボット製作を始めてからの製作日記は、後に続くものには非常に参考になる。でも、それよりなにより読んでいて面白いのだ。
*2 直前に新機能を積みたくなる気持ちはとてもよく分かるが、それで失敗するというのも、とてもよくあることなのだ。
*3 実は、120センチというのはASIMOの公称身長であって、このロボットは身長125センチだったそうだ。だとすると、ほんとうは180センチになるところだった訳だ。
[こばやしゆたか, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。