| News | 2003年11月25日 03:55 PM 更新 |
っぽいかもしれない
こういうの好き!――いま流行りの“ロボットたち”(2/3)
とはいっても筋電位というのはきわめて弱い。すぐに環境ノイズに埋もれてしまう。ましてやこのスーツは“アクチュエーター”っていうノイズ源を自分で持ってしまっているのだ。以前に取材した神奈川工業大学のパワーアシストスーツは、このために筋電位を使うのをあきらめ、筋肉の硬さをセンシングすることにしていた。
しかしHALはあきらめなかった。2カ所の電極の電位差を測る代わりに、手首に着けた生体アースと、それぞれの電極の電位差を求めるようにした。その電位差の“差”が、筋電位になる。こうすることで、伝送系が拾うノイズが打ち消されるという仕組みだ。
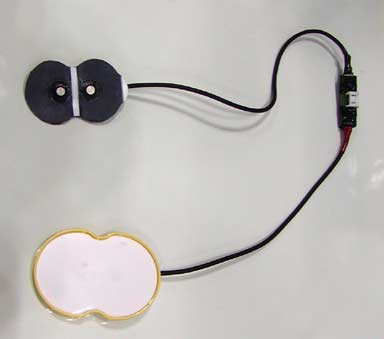
筋電位センサー(上)と、生体アース(下)

神奈川工科大学とアプローチが違うのは、求めるものが違うからだ。神奈川工科大学のパワーアシストスーツは介護用を目指している。つまり、普通に動く人の力をさらに強くしようとするものだ。この場合、筋肉の硬さを使うというのは現実的な解だ。しかしHALは、ほとんど動かない人を普通に動かそうというものだ。筋肉を硬くしてもらおうにも、それはできない。筋電位にこだわらざるを得ない。(*2)
また、筋電位は「動かそうとする」ときに変化する。だから、こちらは人間の動きを読み取って先に押してあげるということができる。これは動きのフィーリングに効いてくるらしい。
現在、まだまだサイズが大きいので、もっとでっぱりの小さいコンパクトなものを制作中だそうだ。
「ウィービー」との再会
「ウィービー」は、HMDをかぶって歩き回ると、そのときに見ているものに関するインフォメーションが表示されるというもの。その位置計測に小さな加速度センサーを使うことで、装置を非常にコンパクトにしているのが特長。
MRテクノロジーEXPO2003にも展示されていたのだけど、あのときは、センサーの調子が悪かったようで、実力を発揮できてなかった。でも、今回は快調。スタッフがHMDをかぶって会場を歩き回っている。デモブースには、彼らが見ている画像がスクリーンに表示されている。
あいさつをしたら「やってみますか?」と聞かれてしまった。こんな面白そうなものをやらないではいられない。かぶって会場をまわってみた。
歩き回りながら、HMDごしにブースを見ると、そのブースに関する簡単な情報(どこのブースか、メインの展示はなにかなど)がオーバーレイ表示される。特に何かボタンを押すような作業は不要で、そっちを見れば情報が出てくる。
ただし、位置決めの精度がかなり悪かった。方向が狂ってしまって、その都度、位置情報のリセットをかけなきゃいけない。スタッフがかぶっているときには問題なく動いていたようだから、これはわたしの歩き方によるものだろう。
ウィービーは加速度センサーで人間の歩き方を推定して、移動量を算出している。この推定の個人差がまだ大きいようだ。また、わたしは、混んでいる会場で慣れないHMDをかぶって歩いていたわけで、足取りはかなり“恐る恐る”になっている。そのような歩き方は、推定の外だった可能性もある。このあたりは今後の研究課題だろう。
コミュニケーションロボット「Robovie-R」
もはやお馴染みのRobovie(ロボビー)の新型。開発:ATR、デザイン:ロボガレージ、製造:イクシスリサーチ&ヴイストンという、各社のコラボレーションによって作られている。ATRのRobovie IIをベースに、大幅なコストダウン(480万円)を図り、コミュニケーションロボットとして売ることを目指したマシンである。

ムービーはこちら(約0.8Mバイト)
*2 とはいえ、脊椎損傷など神経のレベルで動かない場合には、筋電位も使えない。この場合にはまた別の方法を探し出さなくてはいけない。
[こばやしゆたか, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
![]()
ITmediaはアイティメディア株式会社の登録商標です。