| News | 2003年12月18日 08:43 PM 更新 |
歩くより遅いかも? 世界初の“走る”ヒューマノイドロボット(1/2)
ヒューマノイドロボットが“走ったり跳び跳ねたり”できるようになる制御技術をソニーが開発。同社の2足歩行ロボット「QRIO」を使った走行デモンストレーションや、新技術の説明が18日に行われた。QRIOは走るだけでなく、ボール投げや新ダンスも披露。動画もあり。
ソニーは12月19日、ヒューマノイドロボットの運動能力を飛躍的に高める新しい制御技術を開発し、同社の2足歩行ロボット「QRIO」での実証実験に成功したと発表した。従来の歩行技術と組み合わせることで、人間のように“走ったり跳び跳ねたり”できる運動能力を持ったヒューマノイドロボットが開発可能になったという。同日、都内で新技術の説明とQRIOによる走行デモンストレーションが行われた。

“走ったり跳び跳ねたり”できる新QRIO
同社は2000年11月に小型2足歩行ロボット「SDR-3X」を試作。2002年3月には、より運動性能を高めた「SDR-4X」を発表し、今年9月には名称を従来の型番的な“SDR”から「QRIO」に改めるなど、2足歩行ロボットの開発を着実に進めてきた。
従来の2足歩行ロボットの多くは、「ZMP(ゼロ・モーメント・ポイント)安定化規範」を用いた制御理論に基づいて歩行を行っており、同社のSDR/QRIOもこの制御理論をベースに歩行技術を開発してきた。ただしこの歩行運動は、安定した歩行制御を行うために片足または両足が常に路面に接した状態となる、いわゆる“競歩スタイル”となり、ロボットが跳んだり走ったりすることはできなかった。
「われわれはロボットの“走行”を、両足が路面から離れた非接触状態(Loss Of Contact)を含む脚式運動と定義した。つまり、競歩などでは反則となる“両足が宙に浮く瞬間”があれば走行とみなし、それの実現に向けて開発を進めてきた」(同社)
走行ロボットの研究では、マサチューセッツ工科大学(MIT)Leg Laboratoryでのホッピングロボットが有名だ。日本でも産業技術総合研究所が2足歩行型の走行ロボット開発を表明しているほか、同社も2001年4月に、エンタテインメントロボット「AIBO」のボディを使った4足歩行型の「Running AIBO(Quadruped)」を発表している。
AIBOのボディを使った走るロボット「Running AIBO(Quadruped)」
ただし、ホッピングロボットもRunning AIBOも、縦運動を行うアクチュエーターや空気圧を使った“バネ機構”で単一走行に特化させている。今回の新技術の“メダマ”は、制御系とパワー(電源)系を搭載した3次元跳躍・走行機構をヒューマノイドタイプに世界で初めて搭載している点だ。
今回の“走るQRIO”は、新制御技術の搭載にあわせて独自サーボアクチュエーターの出力トルクを高めるなど、走行に適した新機体に改良されている。
「現時点では、“小走り”や“ジョギング”のレベルだが、前進方向だけでなく横方向や旋回も行える。また、停止から歩行・走行・跳躍までシームレスにつながった動きとなる統合運動制御技術も開発。これらの動きを、バネ機構などを使わない従来の関節駆動で、われわれが以前から2足歩行に搭載しているISA(インテリジェントサーボアクチュエーター)の改良・パワーアップで“走り”を可能にした」(同社)
実機による床反力実測値の測定結果では、走行や跳躍の定義とする“両足が宙に浮く(非接地)”状態がグラフで見て取れるという。だが小走り/ジョギングレベルの走りでは、跳躍時/走行時ともに非接地状態の時間はわずか数十ミリ秒と非常に短い。
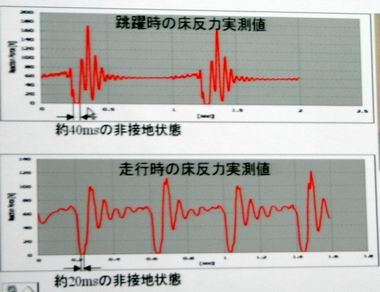
床反力実測値の測定結果。跳躍時/走行時ともに、非接地状態の時間はわずか数十ミリ秒と短い
これだけ短時間だと、両足が浮いている瞬間を写真に撮ることは難しい。発表会場では“ランニングQRIO”が登場し、実際に走る様子を実演してみせてくれたので、ぜひ動画で確認してもらいたい。

ランニングQRIOの走行のようす。動画はこちらをクリック(mpeg1形式:約1.74Mバイト)
“走る”より歩くほうが速い?
足踏み運動から小刻みな足さばきで走行運動に入るその様子は、まさに「小走りやジョギングレベル」という形容詞がふさわしい。
[西坂真人, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
前のページ | 1/2 | 次のページ
![]()
ITmediaはアイティメディア株式会社の登録商標です。