| News | 2003年12月18日 08:46 PM 更新 |
歩くより遅いかも? 世界初の“走る”ヒューマノイドロボット(2/2)
“走る”より歩くほうが速い?
足踏み運動から小刻みな足さばきで走行運動に入るその様子は、まさに「小走りやジョギングレベル」という形容詞がふさわしい。“走るロボット”と聞いた時、大きく足を上げてダイナミックに駆け抜ける姿を想像していただけに、少々期待外れだった。ちなみに走行時のスピードは「分速14メートル」(同社)。SDR-4Xの歩行スピードが分速20メートル(別記事を参照)だから、歩くよりも遅く走っているわけだ。
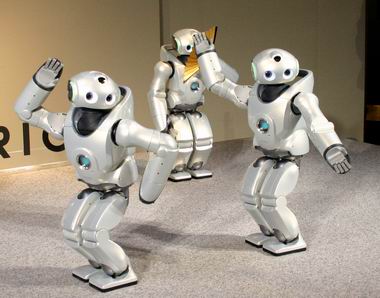
デモンストレーションでは、旋回しながらジョギングするように走ってきたQRIOが、やがて小走り状態から歩行動作に移り、そのままゆっくりと止まっていくという動きも披露した。地味ではあるが、このようにシームレスな動作で走行/歩行/停止ができるのが今回の新しい制御技術の売りなのだ。
「歩行パターン生成がリアルタイムで可能な制御を加えている。また、短時間で状態を計測するセンシング技術や、着地時の路面や外力を考えたコントロールなど、安定化のための適応制御によって、走行からゆっくりとした歩行に移って停止するということが可能になった」(同社)

走行/歩行/停止のシームレスな動作が可能なのも、新制御技術のおかげ。動画はこちらをクリック(mpeg1形式:約3.43Mバイト)
ボールを指で握っての遠投や扇を使ったパフォーマンスも
また、QRIOの新しい柔軟構造の多指ハンドも披露された。ロボットハンドでは持ちにくいカタチの物体をつかんだり、タイミングよく放したりすることができるという。
デモンストレーションでは、投球動作を交えながら握ったボールをタイミングよく放してボール投げをしたり、持ちづらい扇を持ったまま新ダンスを踊るといったパフォーマンスをみせてくれた。

柔軟構造の多指ハンドは、握ったボールをタイミングよく投げることができる。動画はこちらをクリック(mpeg1形式:約3.01Mバイト)
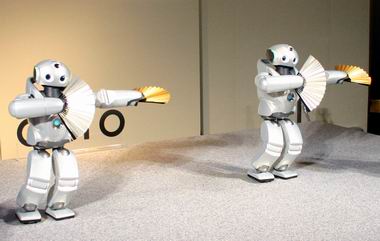
SDRの時のパラパラダンスから一転して“和”の雰囲気をかもし出す新ダンスを披露。見どころは、扇を持ったままの激しい踊りと、途中で扇をパッと落とすところ。動画はこちらをクリック(mpeg1形式:約11.8Mバイト)
同社上席常務の土井利忠氏はSDR-4Xの発表会の時、「年末(2002年末)には商品化に関する発表ができるだろう」と語っていた。だが2003年も残すところあとわずかとなった現時点でも、SDR後継のQRIOは売りに出されていない。QRIOの商品化の可能性について土井氏に聞いてみた。
「商品化をあきらめたわけではないが、“ソニーの顔”としてQRIOを活用していくというのが、現在の会社の方針。今回の新機能は、例えばROBO CUP(ロボット同士のサッカー大会)を行うにも走れなければ試合にならないなど、ヒューマノイドロボットを作るうえで“走る”ことは開発者すべての思い。商品化の時期も今のところ未定だが、走ったりボールを投げたりいろんなことができるようにならないと、商品化してもビジネスとして成り立たない。

「今は“ソニーの顔”的存在だが、商品化をあきらめたわけではない」と語る同社上席常務の土井利忠氏
関連記事
関連リンク
[西坂真人, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
前のページ | 2/2 | 最初のページ
![]()
ITmediaはアイティメディア株式会社の登録商標です。