| News | 2003年2月3日 10:01 PM 更新 |
3点倒立するロボットも登場――「ROBO-ONE」第3回大会(2/2)
寺崎和久氏の「Weird-7」は、ボディ材料に安価で加工しやすい木材を利用し、木ネジとプラスチックバンドのみで固定したという日曜大工感覚の2足歩行ロボットだ。「製作費のほとんどはモーター代。それも一番安いサーボモーターを利用している」(寺崎氏)。
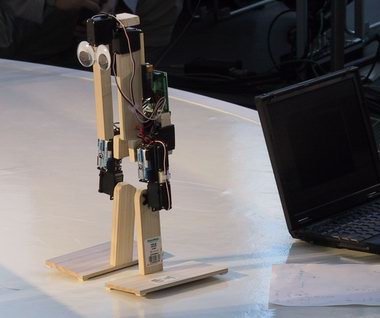
製作費2万2000円の2足歩行ロボット「Weird-7」。会場では“キョロちゃん”と呼ばれていた。「足の値札は低コストの証としてはがさずに残した」(寺崎氏)
だがその実力は高く、完全に片足を上げての2足歩行は難なくこなすは、規定演技のボックスダンスに必要な“カニ歩き”も実に簡単にやって見せた。さらには前転しながら歩行するという離れ業までやってのける柔軟な動きに、会場からは拍手も沸き起こった。
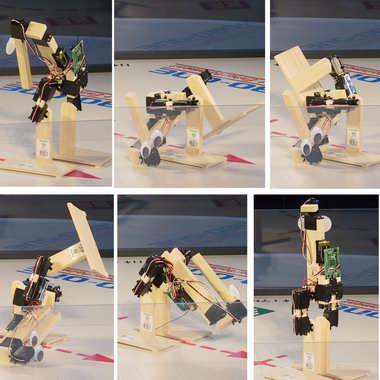
前転しながら歩行するという離れ業も披露
今回の出場のために、遠くサンフランシスコから飛行機に乗って参加したという寺崎氏。「誰でも簡単に作れる2足歩行ロボットがコンセプト。小学生が作れるレベルを目指したので、製作にはノコギリとドライバーしか使っていない。ROBO-ONE参加は今回が最初で最後。なにしろ、旅費がかかるもので……」。
無線通信エラーによる操縦不能が続出
今回予選で目立ったのは、無線通信のエラーで涙をのんだロボットが多かったこと。ロボット自体の作りはしっかりしていても、それを無線で制御できずにデモンストレーションの持ち時間(2分)を浪費してしまうケースが続発した。

無線通信エラーでデモンストレーションできないロボットが続出
今回の会場となった日本科学未来館は、第1回大会でも使われた場所。リングが設置された1階のシンボルゾーンは天井が6階まで吹き抜けになっているのだが、普段は狭い部屋の中での無線動作実験を行っているホビイストたちにとっては、この開放感溢れるスペースがアダになったようだ。「普段は壁などの反射波があって問題なく動作していたケースが、この広々とした会場では無線が届かなくなっているようだ」(大会関係者)。
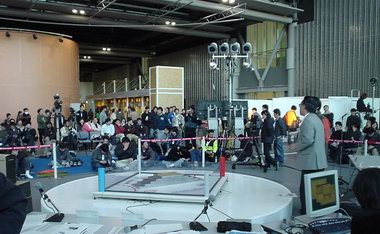
会場となったシンボルゾーン。開放感溢れるスペースも、ロボットの無線制御には不向き?
前回大会から連続しての参加者の中には「第2回の会場(川崎産業振興会館)では問題なく動作していたのだが、ここ(日本科学未来館)ではなぜかダメ。無線のリターンで7-8割がエラーとなり、制御不能になってしまう」と嘆く。
参加者の多くは、ロボットの制御に微弱無線や無線LANを利用していたが、同じ無線方式同士の混信もあったようだ。電波の混信は、通信距離の低下を招く。これにより、普段は無線が届いていた距離でも制御できなくなるケースが発生したのだ。
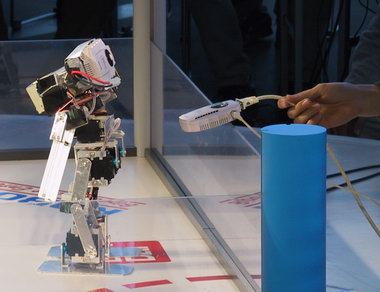
通信機をロボットがいるリングのすぐ近くまで持っていくことで、なんとか操縦できたロボットも
だが一方で、今回の大会ではIPアドレスで無線の制御識別を行うIP無線システムも登場している。制御信号はIPパケットとして送信されるため、高速かつ確実なロボット制御を行えるのだ。
ROBO-ONEの競技規則には「無線操縦システムは試合環境を考慮し、混信などを避け、対戦相手が同じシステムを使っても操縦に支障が無いようにすること」と明記されている。あらゆる環境下においてしっかり操縦できるように工夫することも、ROBO-ONEの醍醐味というわけだ。
関連記事
関連リンク
[西坂真人, ITmedia]
Copyright © ITmedia, Inc. All Rights Reserved.
前のページ | 2/2 | 最初のページ
![]()
ITmediaはアイティメディア株式会社の登録商標です。