NVIDIA、人型ロボット基盤モデル「Isaac GR00T N1」公開 動作と意思決定、2つのAIモデルで分担
米NVIDIAは3月18日(現地時間)、年次イベント「GTC 2025」で、ヒューマノイドロボット基盤モデル「Isaac GR00T N1」を発表した。オープンな基盤モデルであり、フルカスタマイズ可能。あわせて、開発に必要なデータセットなども提供するという。
 NVIDIA、人型ロボット基盤モデル「Isaac GR00T N1」公開
NVIDIA、人型ロボット基盤モデル「Isaac GR00T N1」公開
GR00T N1は、人間の認知原理に着想を得て、反射的で素早い思考をするモデル「System 1」と、じっくりと考えて意思決定をするモデル「System 2」を組み合わせている。視覚言語モデルを活用したSystem 2が周囲の環境と受信した指示に基づいて行動を計画。この計画をSystem 1が連続的なロボット動作に変換する。なおSystem 1は人間によるデモンストレーションデータと、同社のデジタルツイン開発プラットフォーム「NVIDIA Omniverse」で生成した合成データでトレーニング済みという。
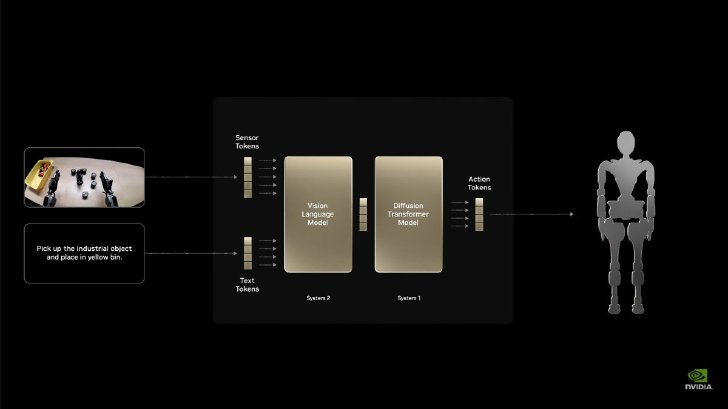 Isaac GR00T N1の構成(画像はGTC 2025の動画より、以下同)
Isaac GR00T N1の構成(画像はGTC 2025の動画より、以下同)
これにより、つかむ、片方または両方のアームでモノを動かすといった共通のタスクを一般化。ロボットの動作スキルと長いコンテクストの組み合わせを必要とする複数ステップのタスクを実行できるという。ユースケースとしては、モノの操作や包装、検査などに対応するとしている。
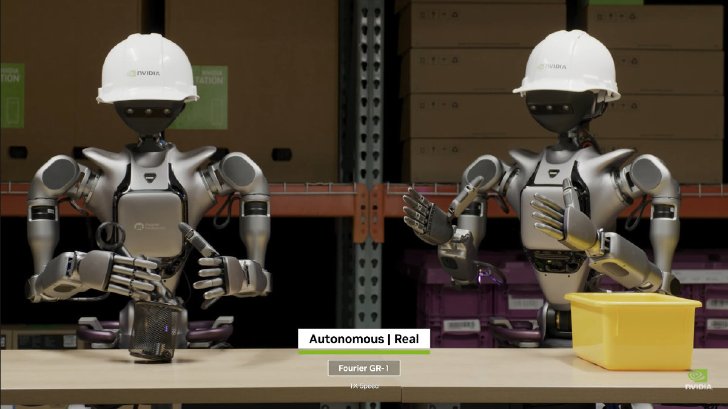 複数ステップのタスク(ロボットからロボットへモノの受け渡しなど)を実施(1/5)
複数ステップのタスク(ロボットからロボットへモノの受け渡しなど)を実施(1/5)
 複数ステップのタスク(2/5)
複数ステップのタスク(2/5)
 複数ステップのタスク(3/5)
複数ステップのタスク(3/5)
 複数ステップのタスク(4/5)
複数ステップのタスク(4/5)
 複数ステップのタスク(5/5)
複数ステップのタスク(5/5)
GTC 2025では、GR00T N1を基盤に構築した事後トレーニング済みのモデルを使用した、ロボットスタートアップの米1X Technologiesのヒューマノイドロボットの映像を公開。家庭内でモノを整理整頓する姿を披露した。
 1X Technologiesのヒューマノイドロボットのデモ
1X Technologiesのヒューマノイドロボットのデモ
「Isaac GR00T Blueprint」も公開 事後学習用の合成データを生成可能に
GR00T N1の発表にあわせ、NVIDIAはロボット開発のためのデータセットと、ロボット動作に関する合成データを生成できるAIツール「Isaac GR00T Blueprint」も公開。人間による少量のデモデータから、大量の合成モーションデータを生成できるとしている。
NVIDIAでは、Isaac GR00T Blueprintを利用し、人間のデモデータ6500時間分に相当する合成データを11時間で生成。この合成データと実データを組み合わせることで、GR00T N1のパフォーマンスが実データのみを使用した場合に比べて40%向上したとアピールしている。
GR00T N1およびトレーニングデータ、タスク評価シナリオはHugging FaceとGitHubからダウンロード可能。Isaac GR00T Blueprintは、GitHubからのダウンロード、もしくは同社のAPI「NVIDIA NIM」で利用できる。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
2
え、21日で37テラも? 高性能SSDを食いつぶす「あのAIツール」にご用心:886th Lap
-
3
AIに「相手に電気ショックを与えろ」と命じ続けたらボタンを押すのか? 11のLLMで“ミルグラム実験” 抵抗できたのは……
-
4
ソフトウェアエンジニアの仕事は「ループを書くこと」になる 内側ループと外側ループ(ハーネス)入門
-
5
Anthropicの営業はAIエージェントをこう使う! 日本法人メンバーが明かす手の内
-
6
復活した「Fable 5」 米政府からのオーダーに対して、Anthropicはどう対策したのか
-
7
「Claude Fable 5」をサブスクの標準機能に――AnthropicのエンジニアがXに投稿 7月8日以降の「早期復活目指す」
-
8
AIで“ゲームキャラの出産二次創作”を何千回と生成する人も……ChatGPTの会話57万件から見えたヘビーな利用実態
-
9
3万円で「Yahoo!ニュース」にPR掲載 プレスリリースをAIで「ニュース風記事」に
-
10
光接続の標準規格「OCI」対応シリコン、GFが27年に投入
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR