悪路もOK――変形移動ロボット「チャリべえ」公開デモ
世界初の搭乗可能なハイブリッド型不整地移動ロボット「チャリべえ」の公開デモンストレーションが5月16日に行われた。4本の脚と2つの車輪を持ち、人を乗せて荒れた路面や凸凹道でも移動できるロボットだ。介護や災害救助の情報収集ロボットといった応用が検討されている。
 「チャリべえ」は2台あり、こちらは少し小さいほう
「チャリべえ」は2台あり、こちらは少し小さいほう
 大きいほうの「チャリべえ」。段差もお手の物。機体の概要は下記の通り
大きいほうの「チャリべえ」。段差もお手の物。機体の概要は下記の通り
| 名称 | チャリべえ |
|---|---|
| 分類 | ハイブリッド型不整地移動ロボット |
| 駆動方式 | バッテリー×2、搭載発電機によりバッテリーに充電 |
| モーター出力 | 200ワットまたは300ワット |
| モータ数 | 15個(脚部各3×4本、車輪1×2輪、段軸1) |
| 操縦方式 | 無線リモートコントロール |
| 外形寸法 | 1050(幅)×2998(奥行き)×693(高さ)ミリ |
| 重量 | 300キログラム |
チャリべえを開発したのは、前東北大学大学院情報科学研究科の中野栄二教授(現在は千葉工業大学総合研究所に在籍)と未来ロボット技術研究センター(fuRo)の中嶋秀朗氏。両氏が東北大学で17年間に渡って研究を進めてきた「チャリオット」という多脚式移動ロボットの技術成果を踏まえ、NEDOプロジェクトの支援を受け、東北大学、千葉工業大学、株式会社ジェー・シー・イーの協力のもとで開発した。
 チャリべえのベースになった「チャリオット」。1~3号機がある
チャリべえのベースになった「チャリオット」。1~3号機がある
チャリべえには、「脚車輪モード」と「車輪モード」という2つの移動モードがある。アスファルト道路など整地された場所では、ボディの左右にある車輪を使ってすいすいと移動できる「車輪モード」。岩場のような凸凹のある場所や傾斜地になると、車輪で体を支持しつつ、4本の脚を蜘蛛のように動かして移動する「脚車輪モード」に“変形”する仕組みだ。しかも、背中に人が乗っている状態でも機体を変形させることができる。
 凸凹のある場所では「脚車輪モード」
凸凹のある場所では「脚車輪モード」
 平坦な場所に出ると脚を畳んで「車輪モード」に
平坦な場所に出ると脚を畳んで「車輪モード」に
多脚式の移動ロボットは世界各地で開発されているが、脚で歩行する際に車輪で体を支持するのはチャリオットシリーズだけだ。「重い車体を車輪でも支持することで脚の負担を軽減し、地面の変化に対して柔軟に対応できるようになった」(中野教授)という。
もう1つの特徴は、チャリべえが“内界センサー”だけで路面状況を判断すること。内界センサーとは、姿勢角度センサー(ジャイロ)や関節角度センサーなど、ロボット内部の情報をフィードバックするためのもの。移動ロボットは、路面状況を把握するために超音波センサーやビジョン(カメラ映像)といった“外界センサー”を備えるのが普通だが、チャリべえには一切使われていない。各関節の角度と本体の姿勢角度から得られる情報だけで状況に柔軟に対処する。
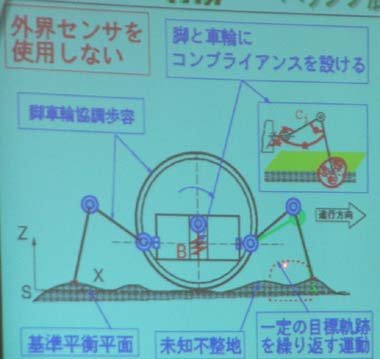
中野教授は、「たとえば視覚(ビジョン)に頼ると、雪道などで動作を誤る可能性が高い。また、超音波センサーなども使用してみたが、スピードが遅く使えなかった」と指摘する。一方、内界センサーを使用するチャリべえの場合、脚に何かが当たり「力がかかる」という情報から障害物の存在を検知する仕組み。逆に力がかからなければ移動の障害とは判断しないため、「雪や落ち葉が路面に積もっていても問題ない」という。
デモンストレーションでは、平らな路面と凸凹の道を交互に渡ったり、路面と凸凹道を跨いだりと、さまざまなシチュエーションでスムーズに移動して見せた。
「たとえば移動困難者が山道を含めて屋外での移動を自由に行うための移動機械、土木や林業など屋外作業が求められる産業分野、さらには自然災害発生地など、人が近づけない場所に出向いて情報収集活動を行うレスキュー。チャリべえは、不整地移動を必要とする多様な移動機械に応用できるだろう」(中野氏)。
なおチャリべえは、「愛・地球博」で6月9日から16日まで開催される「NEDOプロトタイプロボット展」で展示とデモンストレーションが行われる予定だ。
Copyright © ITmedia, Inc. All Rights Reserved.
こんなメディアも見られています
ITmedia NEWSに関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
本日の新着記事
アクセスランキング
-
1
防衛省の「クーラー300台」投稿動画でビックカメラのトラックが注目を集める 同社「販売用の在庫を迅速に提供」
-
2
ドコモ、ahamoを30→40GBに増量 8月1日から 料金据え置きの新キャンペーン
-
3
ソニー、タムロン買収提案の狙いを説明 「イメージング事業の発展につながる」
-
4
一般消費者が「空調服」と書いたら商標権侵害? 公式Xの注意喚起が波紋、弁理士の見解は
-
5
「文スト」スマホゲーム、きょう告知→あす終了 突然のサ終にユーザー混乱 運営元の廃業で
-
6
セブン&アイ、共通会員IDのPayPay統合を正式発表 ソフトバンクや三井住友カードなどが計3000億円出資
-
7
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
8
「楽天ドライブ」アプリから「データ漏洩」「ハッキングした」通知? 運営元「緊急調査中」「通知を開かないで」
-
9
光学25倍ズームのソニー「RX10 V」はもう“レンズ一体型α” 1台で何でも撮れそうな万能感に浸れるぞ
-
10
タカラトミー、デュエマアプリで個人情報漏えいか 最大15万5000人分 氏名や住所など閲覧の恐れ
ITmedia NEWS SNS
インフォメーション
注目情報をチェック
ITmediaNEWSをフォロー
あなたにおすすめの記事PR