fuRo、新型レスキューロボット「Hibiscus」を披露(1/2 ページ)
千葉工業大学未来ロボット技術研究センター(fuRo)の小柳栄次副所長と吉田研究員の開発チームは6月5日、瓦礫の上を安定して走行できる新型レスキューロボット「Hibiscus」を公開した。fuRoが実用化を前提に開発しているレスキューロボットの8号機。倒壊した家屋やビルに入り、赤外線熱感知センサーやサーモグラフィを使って被災者を探索する。
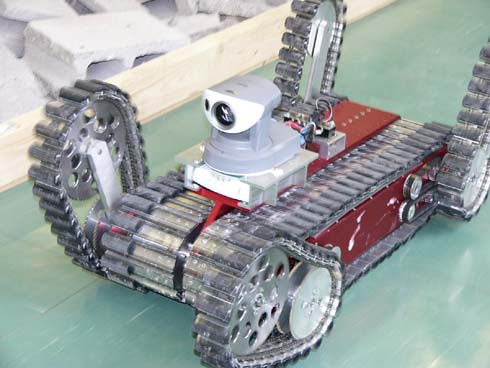 アクシスのネットワークカメラ「AXIS 213 TPZ」やサーモグラフィを搭載した「Hibiscus」。CPUはSH3、OSはNetBSDがベースだ
アクシスのネットワークカメラ「AXIS 213 TPZ」やサーモグラフィを搭載した「Hibiscus」。CPUはSH3、OSはNetBSDがベースだロボットのサイズは、370(幅)×650(長さ)×180(高さ)ミリ。本体に6つのモーターを搭載し、キャタピラ状の“クローラー”を駆動して移動する。前後左右には“フリッパーアーム”とよばれる可動型のクローラーがあり、これを腕のように使って障害物をよじ登る。重量は、リチウムポリマーバッテリーを含めて22.5キロ。3700mAhのバッテリーで1時間程度の探査活動が行えるという。
5月に「ROBOCUPジャパンオープン」で優勝した先代の「03」(ゼロスリー)と比べると、走行スピードが2倍の毎秒1.1メートルとなった。一方、フリッパーアームを使って障害物を乗り越えるスタイルは変わらないため、登坂能力45deg、段差踏破能力40センチメートルというスペックは同じだ。ただし今回は、中越地震の被災地などで実際に運用した経験から、さまざまなシチュエーションに対応できるように改良されている。
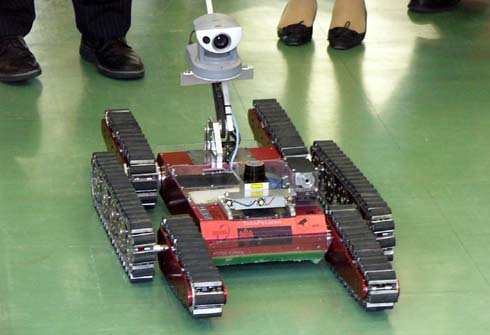 従来モデルの「03(ゼロスリー)」
従来モデルの「03(ゼロスリー)」 「Hibiscus」を上から見たところ。4つのフリッパーアームはすべて独立して動かせる
「Hibiscus」を上から見たところ。4つのフリッパーアームはすべて独立して動かせるたとえば、「03では、ロボットの“お腹”にクローラーがなく、ここが障害物に乗り上げると動けなくなることがあった」(小柳所長)。また、7号機はクローラーの先端が細く、瓦礫などの隙間などに挟まることも多い。そこでHibiscusでは、ロボット全体をクローラーが覆うように配置を見直し、クローラーのフロント径を拡大した。さらに「03は前後のクローラーは独立していたものの、左右は同期して動く仕様」を改め、前後左右のクローラーを完全に独立して動作させる。
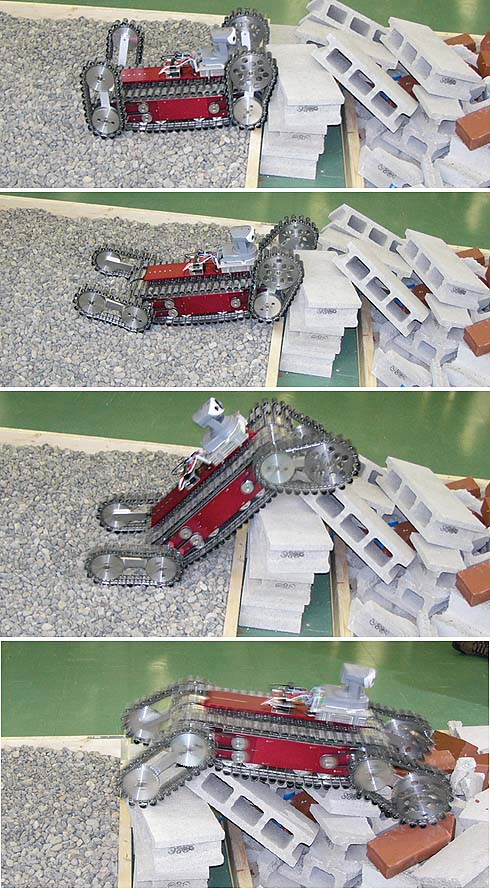 デモンストレーションでは、砕いたブロック塀や砂地を移動してみせた。ブロック塀が積まれた場所も裏側のクローラーを使ってうまく乗り越える
デモンストレーションでは、砕いたブロック塀や砂地を移動してみせた。ブロック塀が積まれた場所も裏側のクローラーを使ってうまく乗り越える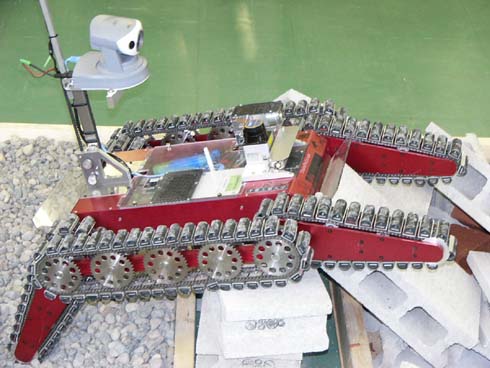 一方、03はブロックがお腹に引っかかって動けなくなってしまった
一方、03はブロックがお腹に引っかかって動けなくなってしまったCopyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。