300万円台で買える、等身大の「二足歩行ロボ」を見てきた あなたならどう使う?(2/3 ページ)
下半身はシミュレーション、上半身は模倣学習
TechShareによると、G1の下半身制御には深層強化学習を活用しているという。シミュレーション環境で数千体の仮想ロボットを動かし、成功と失敗を繰り返させることで、より最適な歩行バランスを学習させる方式だ。
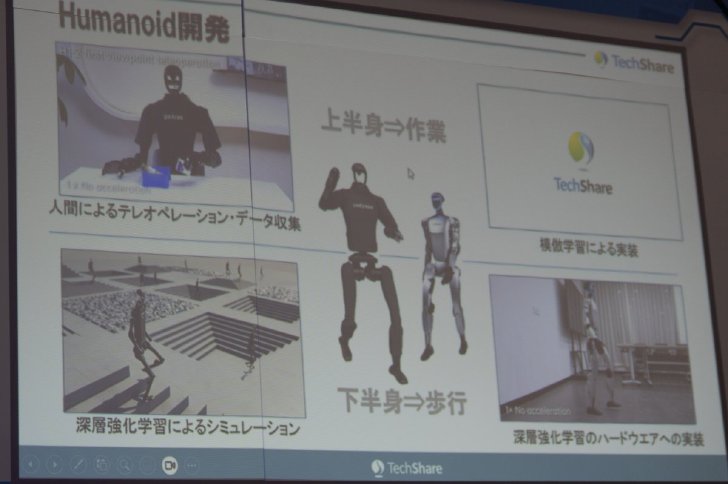 下半身はシミュレーションベースで学習し、上半身は模倣学習を使って動きを洗練させる
下半身はシミュレーションベースで学習し、上半身は模倣学習を使って動きを洗練させる
もともと二足歩行をルールベースでプログラムしようとすると、足首や膝、腰など多自由度の関節が相互に影響し合い、設計が極めて煩雑になりやすい。そこで、物理モデルの細部にこだわる代わりに、仮想空間内で試行錯誤を高速に回し、実機への適用段階で微調整を施すアプローチを取っているそうだ。
一方、上半身の動きには模倣学習の概念が取り入れられている。手先で物を握ったり、人と握手する動作は、対象物や相手の動き方が千差万別であるため、ルールベースやシミュレーションだけでは対応しづらい面がある。
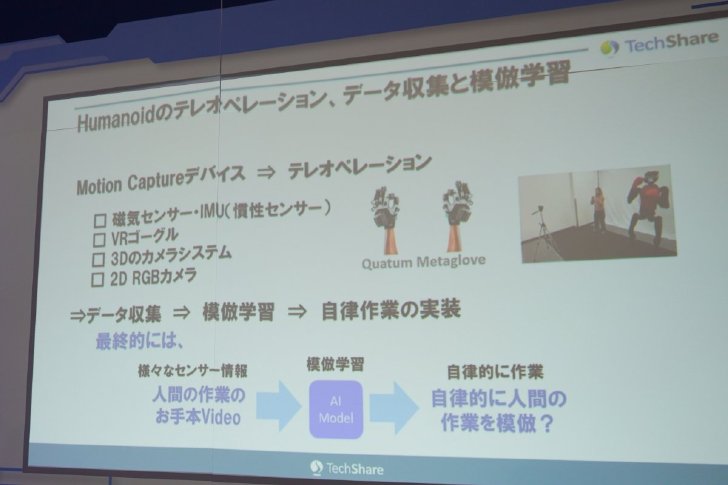
そこで人間の操作データ――例えば遠隔操作やモーションキャプチャーから得られる指の曲げ角度、力加減、カメラ映像などをAIに学習させ、ロボットが自然な作業動作を身に付ける狙いがある。
 上半身はさまざまなタスクに対応するため、人間の動きを模倣するアプローチを取る
上半身はさまざまなタスクに対応するため、人間の動きを模倣するアプローチを取る
TechShareのブースでは、指先に磁気センサーを仕込んだグローブを用いて手指の動きを取得する例が紹介されていた。
 頭部にはLiDARや、米IntelのRealSense深度カメラを備えている
頭部にはLiDARや、米IntelのRealSense深度カメラを備えている
Copyright © ITmedia, Inc. All Rights Reserved.
この記事の著者
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
2
え、21日で37テラも? 高性能SSDを食いつぶす「あのAIツール」にご用心:886th Lap
-
3
AIに「相手に電気ショックを与えろ」と命じ続けたらボタンを押すのか? 11のLLMで“ミルグラム実験” 抵抗できたのは……
-
4
ソフトウェアエンジニアの仕事は「ループを書くこと」になる 内側ループと外側ループ(ハーネス)入門
-
5
「Claude Fable 5」をサブスクの標準機能に――AnthropicのエンジニアがXに投稿 7月8日以降の「早期復活目指す」
-
6
Anthropicの営業はAIエージェントをこう使う! 日本法人メンバーが明かす手の内
-
7
復活した「Fable 5」 米政府からのオーダーに対して、Anthropicはどう対策したのか
-
8
AIで“ゲームキャラの出産二次創作”を何千回と生成する人も……ChatGPTの会話57万件から見えたヘビーな利用実態
-
9
3万円で「Yahoo!ニュース」にPR掲載 プレスリリースをAIで「ニュース風記事」に
-
10
光接続の標準規格「OCI」対応シリコン、GFが27年に投入
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR