東大、オープンソースの「四足歩行ロボ」 部品はオンライン発注可 階段を上がる姿など披露(1/2 ページ)
東京大学は4月1日、同学の研究グループがオープンソースの四足歩行ロボット「MEVIUS2」を開発したと発表した。オンライン発注サービスで調達した金属部品によって機体を機体を構成することで、従来のオープンソースロボットに比べ耐久性を強化。デモ動画では、階段を上がる姿などを披露している。
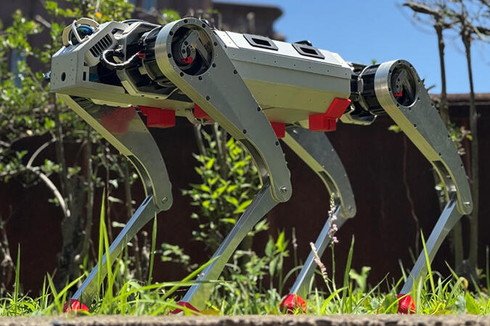 MEVIUS2(出典:プレスリリース)
MEVIUS2(出典:プレスリリース)
これまでオープンソースの四足歩行ロボットは、機体を3Dプリンタで製作する仕様だったため、サイズや耐久性に課題があったという。
そこでMEVIUS2では、溶接・切削した金属部品のオンライン発注サービスを活用し、機体を構成できる設計にした。これにより、長さ約73cm、幅約38cmのサイズを実現し、LiDARやHDRカメラなどのセンサー類を搭載できるようにした。
MEVIUS2は、機体の周囲の環境をマルチモーダルに認識できるほか、さまざまな不整地を移動できるという。公式サイトのデモ動画では、屋外の階段や斜面を移動する姿などを確認できる。
MEVIUS2の設計データやソフトウェアは、GitHubで公開中。個人の研究者でも四足歩行ロボットを自作できるようにすることで、ロボットの自律動作などに関する研究開発を後押しする。
MEVIUS2の開発は、東京大学次世代知能科学研究センターの河原塚健人講師らの研究グループが手掛けた。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
2
え、21日で37テラも? 高性能SSDを食いつぶす「あのAIツール」にご用心:886th Lap
-
3
AIに「相手に電気ショックを与えろ」と命じ続けたらボタンを押すのか? 11のLLMで“ミルグラム実験” 抵抗できたのは……
-
4
ソフトウェアエンジニアの仕事は「ループを書くこと」になる 内側ループと外側ループ(ハーネス)入門
-
5
復活した「Fable 5」 米政府からのオーダーに対して、Anthropicはどう対策したのか
-
6
Anthropicの営業はAIエージェントをこう使う! 日本法人メンバーが明かす手の内
-
7
AIで“ゲームキャラの出産二次創作”を何千回と生成する人も……ChatGPTの会話57万件から見えたヘビーな利用実態
-
8
光接続の標準規格「OCI」対応シリコン、GFが27年に投入
-
9
「ねこ」検索で「手押し一輪車」表示――モノタロウが守った、生成AIに“譲れない”購買体験
-
10
「Claude Fable 5」の性能が落ちた? 提供停止前後で比べた結果 米AI企業2社がそれぞれ報告
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR