シンプル・イズ・ザ・ベスト――「チャリべえ」:っぽいかもしれない(1/2 ページ)
5月16日、千葉工業大学で人間が乗れるハイブリッド型不整地移動ロボ「チャリべえ」(Chari-Be)のデモンストレーションが行われた。ロボットを長年研究してきた研究者による「シンプル・イズ・ザ・ベスト」なマシンなのである。
このマシンを作ったのは、中野栄二教授と中嶋秀朗研究員。お二人ともこの春まで東北大学大学院情報科学研究科に所属し、2005年4月から千葉工業大学総合研究所に移ってきたのだ。なお中嶋さんは千葉工業大学未来ロボット研究センターの所属だ。あのfuRoである。
 チャリべえ1号機。鉛バッテリーで10分間駆動可能。発動機発電機も積んでおり、これを使えば1時間駆動もできる
チャリべえ1号機。鉛バッテリーで10分間駆動可能。発動機発電機も積んでおり、これを使えば1時間駆動もできる チャリべえ2号機。1号機よりも30キロほどの減量に成功。1号機に発電機を積むこともできる
チャリべえ2号機。1号機よりも30キロほどの減量に成功。1号機に発電機を積むこともできるチャリべえは人間をのせて、不整地でも道路のような整地でも自由に動くことができる。今は操縦は外からリモコンで行われている(搭乗者は完全に“お客さん”だ)のだけど、不整地走行でも操縦者は地面の様子を把握する必要はない。移動方向と速度を与えるだけだ。あとは、チャリべえが自分で状態を判断して進むのだ。また、整地に入ったら変型して車輪走行になるのだけれど、この変型の指示は操縦者が出す。
チャリべえは、脚と車輪のハイブリット構造だ。これが1つ目の特徴である。マシンの中央の左右に大きな車輪があり、これが駆動輪になる。そしてその前後に2対(4本)の脚があるのだ。不整地では、この脚でふんばって車体を持ち上げたりするのだけど、基本的には車輪が接地してそれで前に進もうとする。また、整地では、脚は折り畳まれ、ひじ(ひざ?)のところにある全方向車輪で接地するようになる。このときには完全に車輪で進む。
 白いのがひじ関節についている全方向車輪。おなじみオムニホイールだ。反対側の黒いのはモーター
白いのがひじ関節についている全方向車輪。おなじみオムニホイールだ。反対側の黒いのはモーターハイブリットにすることで、構造的に難しい「脚」で全体重を支えるということをしなくてすむ。そのぶん、脚を細くすることができる。もちろん車輪には負担がかかるのだけれど、車輪に対する技術ならば人類はたくさん持っているのだ。
 不整地走行。正面より。これはチャリべえ1号機の人が乗らないときの画像(動画は
不整地走行。正面より。これはチャリべえ1号機の人が乗らないときの画像(動画は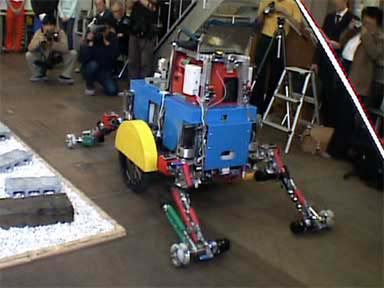 変型〜整地走行。上の画像の続き(動画は
変型〜整地走行。上の画像の続き(動画はCopyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。