シンプル・イズ・ザ・ベスト――「チャリべえ」:っぽいかもしれない(2/2 ページ)
 不整地走行。横から。これはチャリべえ2号機に人が乗ったときの画像(動画は
不整地走行。横から。これはチャリべえ2号機に人が乗ったときの画像(動画は 人間の搭乗から不整地走行。上から。チャリべえ1号機(動画は
人間の搭乗から不整地走行。上から。チャリべえ1号機(動画は左右の車輪は段軸制御といって、軸の高さが変わるようになっている。これによって片方の車輪だけ乗り上げていても、重量は両方の車輪に分散されるし、搭乗者は水平に保たれるということになる。
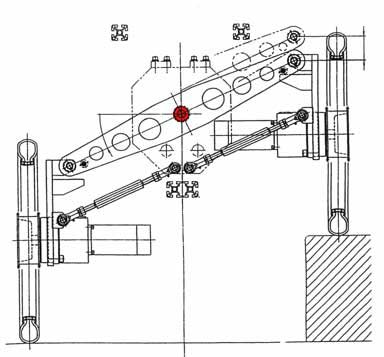 段軸制御構造図。配付資料より。赤い部分にモータがある
段軸制御構造図。配付資料より。赤い部分にモータがあるそして、最後の特徴は、視覚とか足裏とかいうような外界センサーを使っていないこと。ロボットが感じるのは、自分が脚をどれだけ曲げているかという情報(モーターに内蔵されたロータリーエンコーダーによる)と、自分の体がどれだけ傾いているかという情報(ジャイロと傾斜計による)だけである。
つまり、不整地を歩くときには、「脚をとにかくのばしてみて、どっかにぶつかったら、ああここに地面があるんだなと思う」というわけだ。めちゃくちゃプリミティブでシンプルな方法である。
地面の情報を得ようとするとき、まず視覚による方法が考えられる。でも、これは、枯葉の山なんかがあったときに、それを堅いものだと思ってうっかり踏んづけて、脚がずぶずぶなんてことになりかねない(人間でもときどきやるね)。
また、視覚情報はノイズとの戦いであり、それを処理するために膨大な研鑽量も必要になる。次に、足裏センサーを使うという方法も考えられる。中野教授によると、これも誤認識との戦いになるのだそうだ。この方針を手がけたこともあるのだけれど、「手探り(足探り?)」ではあると思った山がなくて、そのままずぼっというなんてことが起きがちになる。また、足先にセンサーがあると、それを濡らさないようにしなければなんてことも考えなければいけなくなる。
その点、チャリべえの方式は簡単だ。使っているのもロータリーエンコーダーなんてすでに確立している技術である。足先も単なるゴムブッシュだ。デモの途中でこのゴムが引っかかってとれちゃうなんてこともあったのだけど、別にそれでも問題なくデモは続行された。シンプルなものは強いのだ。
「足先センサーのような方式も、それはまた優れたものだと思います。でも、こういう私たちのような方式も誰かが研究しないと。おそらく、その両方が合わさっていった先にもっといいものがあるのだと思うのです」(中嶋研究員)
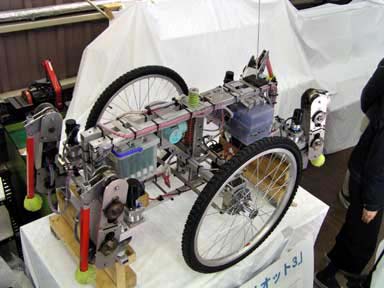 東北大学時代の「チャリオット3」。人を乗せるなんてことはできないが、原理的なしくみはチャリべえと同じ。外からしくみが見えるので、わたしなんかにはうれしい
東北大学時代の「チャリオット3」。人を乗せるなんてことはできないが、原理的なしくみはチャリべえと同じ。外からしくみが見えるので、わたしなんかにはうれしいところで、不整地走行の時の脚のはこび方(歩容)は、トカゲと同じスタイルである。「大きなトカゲは、お腹をすりながら歩いているんですよ。脚に全体重をかけないんですね」(中野教授)なのだそうだ。なるほどチャリべえと一緒だ。
チャリべえは6月9〜19日に愛知万博の「NEDOプロトタイプロボット展」でもデモされる。ただし、人間の搭乗はできず、リモコンも有線だそうだ。万博の規則なのだ。
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。