雨にもマケズ、氷にもマケズ――過酷な環境に耐えるロボット「HRP-3P」登場
川田工業、川崎重工業、独立行政法人産業技術総合研究所は、人間型ロボットの試作機「HRP-3P」を発表した。従来の「HRP-2」(プロメテ)に比べると外観はかなり地味。しかし、関節や電装部の防塵・防滴機能を実現するなど、「従来のロボットでは作業が難しかった過酷な環境下でも稼働できる」(川田工業)仕様になっている。さらにHRP-3Pをコントロールする「遠隔操作コックピット」も登場した。

身長は160センチ、体重は65キロ。プロメテ(154センチ、体重58キロ)と比較して若干大きくなった。これは、脚(大腿部と頸部)のリンク長がそれぞれ20ミリ延長されたためだ。また、腕や手のひら(ハンド部)などの稼働箇所(自由度)を増やし、より複雑な作業をさせることが可能になっている。全身の自由度は計36とプロメテより6つも多い。
各関節の軸部分や電装部品を実装している部位は、密閉性を高め、シールするなどして防塵・防滴性(IP52)を確保した。一方、密閉すると内部にこもってしまう熱を効率的に排出できるよう、放熱フィンの表面積を拡大するなど廃熱機構を拡充。雨が降り注ぐような場所でも稼働できるようになった。
 雨が降ってきても大丈夫。写真は1時間に100ミリの雨(シャワー)をかけても問題なく動作するというデモ
雨が降ってきても大丈夫。写真は1時間に100ミリの雨(シャワー)をかけても問題なく動作するというデモまた、脚が滑った量を検出するスリップ検出技術と、滑らかな歩容生成技術を新たに導入。HRP-3Pは体のバランスをとりながら歩くことができるため、摩擦係数0.1の滑りやすい路面も歩行可能だという。摩擦係数0.1といえば、自動車が“氷上”を走行するときに相当する滑りやすさだ。
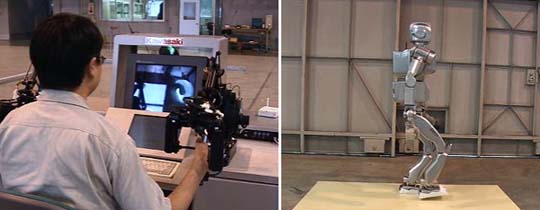 遠隔操作用コックピット(左)と滑りやすい場所の歩行デモ
遠隔操作用コックピット(左)と滑りやすい場所の歩行デモさらに、ZMP(Zero Moment Point:ロボットと床面の間に働く水平軸まわりのモーメントが0になる点のこと)の概念を拡張した「一般化ZMP」と呼ばれる指標を新たに考案・実装したことで、“手で体を支えながら動作する”脚腕協調制御を実現。作業の幅が格段に広がった。そしてロボットの体内LANには、産総研とムービングアイが共同開発した「実時間イーサネット」を利用。各部のCPUが分散処理を行う際のリアルタイム性を向上させている。
ロボットのコントロールは、自律制御と遠隔コントロールのハイブリッド型だ。たとえば人間が歩くとき、進む方向は意識しているが、歩く動作自体は無意識に行っている。これと同様に、意識する行動は遠隔操作で指示するが、たとえば体のバランスをとるといった基本的な動作は自律制御に任せる仕組みだ。いわば“半自動”で、操縦者は本来の目的に集中できるようになった。
バッテリーは、プロメテのニッケル水素充電池から、よりエネルギー密度の高いマンガン系リチウムイオンバッテリーに変更され、連続120分の標準歩行が可能になっている。プロメテのときは60分だったため、倍の駆動時間を確保したことになる。
2006年には「HRP-3」が登場
HRP-3Pは、NEDOが2002年から5カ年計画で実施している基盤技術研究促進事業「実環境で働く人間型ロボット基盤技術の研究開発」の一環として開発されたもの。川田工業は主に過酷な環境に耐えるハードウエア技術、川崎重工が遠隔操作技術、産総研知能システム研究部門ヒューマノイド研究グループがソフトウェアの開発を担当した。
今後はHRP-3Pを用いて個々の機能向上を図るほか、過酷な環境で実際に働く人間型ロボットの実用化を目指すという。なお、今回発表された「HRP-3P」の“P”はプロトタイプの略で、2006年には最終的な研究成果として「HRP-3」が開発される予定だ。
HRP-2では、出渕裕氏によるレイバーを彷彿とさせるデザインで注目を集めたHRPだが、HRP-3Pは随分と地味になった。理由は単純で、「プロトタイプは、機能検証のために開発した」からだ。実際、HRP-2もプロトタイプの「HRP-2P」のときは地味だった(色は派手だった)。逆にいえば、来年登場するHRP-3ではデザイン面も期待できるのかもしれない。
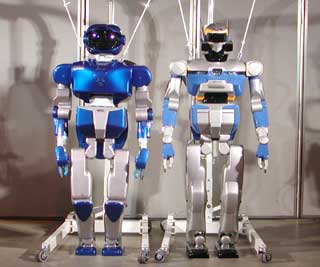 「HRP-2P」(左)と「HRP-2」“プロメテ”は随分違う
「HRP-2P」(左)と「HRP-2」“プロメテ”は随分違う関連記事
 「テレビつけて!」〜HRP-2、呼びかけに答える機能アップ
「テレビつけて!」〜HRP-2、呼びかけに答える機能アップ
産総研は人間型ロボット「HRP-2」(プロメテ)の知覚機能拡大に成功したと発表した。新開発された音声認識機能によって雑音のある場所でも人の声を認識し、指示された動作を行える- 出渕裕デザインのインパクト〜ヒューマノイドロボット「Promet」登場
「機動警察パトレイバー」をほうふつさせる出渕裕デザインのヒューマノイド「Promet」の発表会に行ってきた。デモシーンの動画を含めて、たっぷり楽しんでいただこう
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。