「ルンバ」の動きは“ランダム”ではない――米iRobot、コリン・アングルCEOの哲学(1/2 ページ)
※本記事はアフィリエイトプログラムによる収益を得ています
近年、日本市場ではロボット掃除機への新規参入が相次ぎ、製品発表時に米iRobotの「ルンバ」が引き合いに出されるケースも増えた。新規参入組にとって、先行するルンバは格好のベンチマーク。とくに同じ場所を何度も往復して掃除するルンバを「非効率的」と論じられることが多い。しかし来日した米iRobotのコリン・アングルCEOは、自社の技術と哲学を紹介しつつ、そうした指摘に真っ向から反論した。
 来日した米iRobotのコリン・アングルCEO
来日した米iRobotのコリン・アングルCEO
ルンバを非効率的という指摘は、主にナビゲーションシステムに起因する。例えば米国ではiRobotに次ぐ2位のシェアを持つ米Neato Roboticsの「ボットバック」は、SLAM(Simultaneous Localization And Mapping)とレーザーセンサーで部屋の形や家具のレイアウトを把握し、必ず右側の壁際から直線的な軌跡で掃除をはじめ、部屋を塗りつぶすように掃除していく。同じ場所を2度は掃除しない。「競合製品にはランダムな軌跡で掃除するものも存在するが、比較すると約1/4の時間で掃除を完了する」(米Neato Roboticsのマリーニ・ジャコモCEO)。
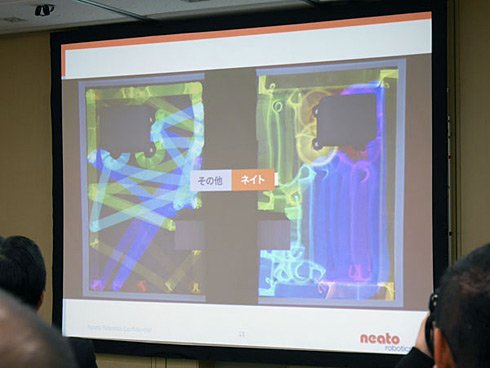 Neato Roboticsの発表会で使われたロボット掃除機の軌跡を比較したもの。左は「その他」となっているが、明らかにルンバ
Neato Roboticsの発表会で使われたロボット掃除機の軌跡を比較したもの。左は「その他」となっているが、明らかにルンバ
高級家電ブランドとして知られる独Mieleの「Scout RX1」は、本体上部に天井カメラを装備。基本的には内蔵のジャイロセンサーを使って平行経路を辿るが、1分間に7回ほど部屋の形を把握し、ジャイロセンサーが設定したルート通りに掃除しているかを確認する「スマートナビゲーション」だ。同社では、「現在のロボット掃除機には、ランダムナビゲーションとシステムナビゲーションという2種類のシステムがある。ランダムナビゲーションはランダムな動きでさまざまな角度から掃除するように設計されているが、何度も掃除する場所がある一方、掃除されていない箇所も残る」と指摘している。
地雷除去に使われるアルゴリズム
こうした意見に対し、アングル氏はまず「ランダム」という言葉を否定する。「ルンバは“ランダム”ではない。ルンバの場合、地雷除去に使っているアルゴリズムを使用している。つまり、どんな地形であっても、石のような障害物があっても、目的の場所に辿り着く仕組みになってる」。軍事用から災害現場、遠隔医療で活躍するものまで、幅広くロボットを開発しているiRobotならではの回答だ。
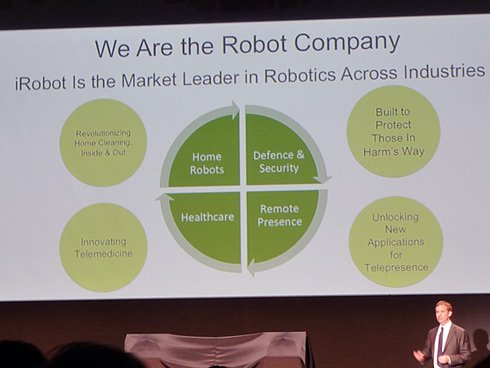 iRobotが手がける4つの事業分野(写真はルンバ800シリーズ発表時のもの)
iRobotが手がける4つの事業分野(写真はルンバ800シリーズ発表時のもの)
 軍事から災害現場、遠隔医療など、さまざまな場所でロボット技術を活用している
軍事から災害現場、遠隔医療など、さまざまな場所でロボット技術を活用している
その上で、「ロボット掃除機がシステマチックに指示された道だけを通るのであれば、システマチックに掃除できない場所が出てくる危険性がある。例えば家具の配置が複雑だったりしたときも、ルンバはなんとかして家具の裏側を掃除できる道を探すように動くが、システマチックに動く他社の掃除機は、決してそこに辿り着けない」と指摘した。
ただし、掃除時間の長さについては、「イエスとノーの2つの答え方がある」という。「“イエス”というのは、まずルンバは室内を完全に掃除するように設計されているからだ。ダート・ディテクトの技術で同じ場所を5回行ったり来たりして掃除していない場所をなくす。だから“時間が長い”という指摘は間違いではない。しかしそれは、われわれとしては満足すべき結果だ」。そして“ノー”の部分とは、「人がやることは天面のボタンを押すことだけ。ロボットが掃除をしている時間は何もしなくていい。時間は長いのだろうか?」(アングル氏)。
 現在の最上位モデル「ルンバ880」
現在の最上位モデル「ルンバ880」
こうしたシステム上の違いが出てくるのは、それぞれの起業が持つ「哲学」の差だという同氏。「システマチックな動きは作業時間を最短にしたいという発想だ。おそらくはバッテリーが持たないために、それまでに掃除をすべて終わらせたいと考えているのだろう」。
Copyright © ITmedia, Inc. All Rights Reserved.
この記事の著者
関連記事
こんなメディアも見られています
ITmedia NEWSに関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
本日の新着記事
アクセスランキング
-
1
防衛省の「クーラー300台」投稿動画でビックカメラのトラックが注目を集める 同社「販売用の在庫を迅速に提供」
-
2
ドコモ、ahamoを30→40GBに増量 8月1日から 料金据え置きの新キャンペーン
-
3
セブン&アイ、共通会員IDのPayPay統合を正式発表 ソフトバンクや三井住友カードなどが計3000億円出資
-
4
一般消費者が「空調服」と書いたら商標権侵害? 公式Xの注意喚起が波紋、弁理士の見解は
-
5
ソニー、タムロン買収提案の狙いを説明 「イメージング事業の発展につながる」
-
6
なんて読む? 日本の珍地名「重蘭窮」
-
7
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
8
「文スト」スマホゲーム、きょう告知→あす終了 突然のサ終にユーザー混乱 運営元の廃業で
-
9
タカラトミー、デュエマアプリで個人情報漏えいか 最大15万5000人分 氏名や住所など閲覧の恐れ
-
10
「楽天ドライブ」アプリから「データ漏洩」「ハッキングした」通知? 運営元「緊急調査中」「通知を開かないで」
ITmedia NEWS SNS
インフォメーション
注目情報をチェック
ITmediaNEWSをフォロー
あなたにおすすめの記事PR