第2回「いきなり大事件」:ロボットキット「Weird-7」を作りました(1/5 ページ)
前回は、Weird-7を組み立てて電池を買いにいったところまでだった。今回はいよいよ、Weird-7を調整して動かしてみる。
前回は、Weird-7を組み立てて電池を買いにいったところまでだった。今回はいよいよWeird-7を調整して動かしてみる。
電池を買ってきた
とにかく、買ってきた電池を装着。モーター用の単三形乾電池と、制御基板用の「006P」だ。

電源をON。“がしゃがしゃ”って音がして、サーボモーターに力が入り、とにかく立つ。モーターはジーという音を立てる。知らないと不安になるけど、わたしはロボットの取材でこのサーボモーターの音は知っているので平気だ。それにしても、「きをつけ」の形が崩れている。
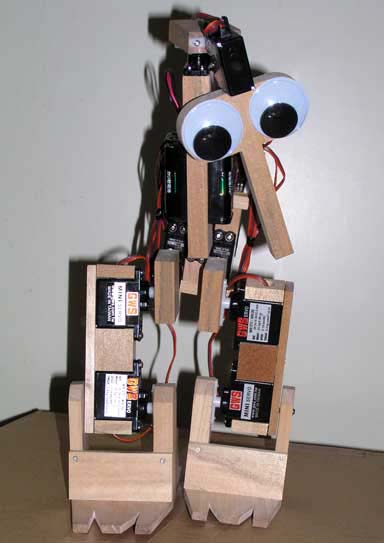
電源を入れた状態ではモーターは「0度」の位置に固定されるのだけど、例のサーボホーンの取り付けのずれのせいで、モーターの「0度」とWeird-7の姿勢の「0度」とが食い違っているのだ。この調整を含めて、いよいよパソコンと接続だ。
さて、どうやるんだとマニュアルを見たら、まずいことが書いてあった。パソコン接続前の状態では「絶対に電源を入れてはいけません」だったのだ。うわぁ、もう入れちゃったよ。あわてて電源を切ったけど大丈夫かな。
ソフトのインストール。Virtual PCでもOKだ。
気を取り直して、付属CDからソフトウェアをインストールしよう。パソコンとWeird-7とは付属のシリアルケーブルで接続される。シリアルポートがないマシンのためにUSBシリアル変換機も付属する。これを使う場合には、ドライバもインストールしなければいけない。
前にもいったけど、うちにあるWindowsマシンはタワー型だけだ。もちろんシリアルポートもあるのだけど、ケーブルの長さを稼ぎたいので、USB(これなら延長は簡単)を使うことにした。

インストールは無事終了。ケーブルを接続したところで、ちょっとまずい気持ちになった。いや、これまでもまずい気持ちがだんだん盛り上がってきていたんだけど、それがここで臨界点に達したのだ。
タワーマシンは、うちではだめだ。
Copyright © ITmedia, Inc. All Rights Reserved.