産総研、ロボット開発の基盤技術をオープンソースで公開
産総研などが共同開発したロボットソフトウェアプラットフォーム「OpenHRP3」がEPLの下で公開された。ロボットのソフトウェア開発・シミュレーションといった部分の効率性向上が期待される。
産業技術総合研究所知能システム研究部門、東京大学中村・山根研究室、ゼネラルロボティックスは6月18日、共同開発したロボットソフトウェアプラットフォーム「OpenHRP3」(Open Architecture Human-centered Robotics Platform 3)を、EPL(Eclipse Public License)の下で配布を開始したことを明らかにした。個別に開発されることが多い、ロボットソフトウェア開発の非効率性の解消が期待される。
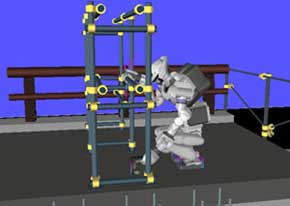
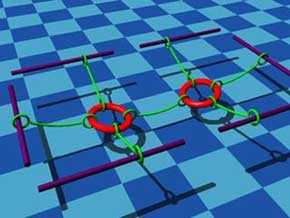 ヒューマノイドロボットの例(左)と多数の接触を伴うシミュレーションの例(右) (画像出典:産総研)
ヒューマノイドロボットの例(左)と多数の接触を伴うシミュレーションの例(右) (画像出典:産総研)OpenHRP3は、ロボットアーム、車輪型移動ロボット、人間型ロボットなどの多様なロボットの動力学シミュレーションと視野画像シミュレーションを行うことが可能で、これを用いることでロボットの経路計画・動作制御・視覚フィードバック制御などのソフトウェア開発を効率的に行える。OpenHRPでは基本となるサーバ/クライアントとして以下のようなプログラムで構成される。
| プログラム | 詳細 |
|---|---|
| Controller | ロボットの制御プログラムを実装するサーバ。ユーザーはこのControllerを開発することで、独自の制御プログラムをシミュレーション可能となる |
| DynamicsSimulator | 力学計算を行うサーバ。順動力学計算・接触力計算・積分など、シミュレーションにおける主要な計算はこのサーバが行う |
| CollisionDetector | 干渉検出処理を行うサーバ。トライアングルメッシュとして表現された幾何モデル同士の干渉点を検出する。接触シミュレーションのためDynamicsSimulatorから利用される。 |
| ModelLoader | ロボットの機構や形状のモデルを記述したモデルファイルを読み込むためのサーバ。テキスト記述されたモデルファイルをパースし、プログラム上扱いやすいデータ構造として提供する。 |
| ViewSimulator | ロボットのカメラから得られる映像をシミュレートするサーバ。主にカメラ映像を利用するコントローラーから利用される |
| GrxUI | OpenHRPの標準GUIフロントエンド。各サーバとシミュレーションの進行を管理し、シミュレーション結果をグラフィック表示する |
OpenHRP3の動力学計算エンジンはABA(Articulated Body Algorithm)とADA(Assembly-Disassembly Algorithm)の2つを実装する。両者の使い分けとしては、動作速度の点で、比較的自由度の少ないロボットに対してはABAエンジン、自由度の多いロボットに対してはADAエンジンが適しているという。
ABA、ADAどちらの動力学計算エンジンも、物体間に働く反力の計算は拘束条件法を利用しているが、複雑な接触条件に対しても安定かつ効率的に解を得ることが可能なアルゴリズムが開発できたことで、ロボットと環境物体の間で多数の接触を伴うシミュレーションも実現可能とした。
今後、ソフトウェア開発環境の充実、音響シミュレーションの追加などの継続開発が予定されている。
関連記事
 業現場にロボットを派遣せよ――人間型ロボット「HRP-3P」
業現場にロボットを派遣せよ――人間型ロボット「HRP-3P」
ロボットが作業現場で働く――そんな光景はアニメでしかあり得ないという考えはもはや過去のものになりつつある。悪環境、過酷環境での実用化も見えてきたようだ。 新たなロボット工学3原則はコミュニケーションありき
新たなロボット工学3原則はコミュニケーションありき
NECのパーソナル・ロボット「PaPeRo」は、これまでロボット開発がとらわれていたロボット工学3原則から脱却し、コミュニケーションを通じて時間や空間を共有するというコンセプトを基に開発が続けられている。 これが現実のパトレイバーか? HRP-2 Promet
これが現実のパトレイバーか? HRP-2 Promet
ロボット・アニメが隆盛の日本では、プロメテのように遊び心あふれるデザインのロボットが作られる土壌がある。現実がアニメを超える日は来るか。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
アイティメディアからのお知らせ
注目のテーマ

人気記事ランキング
- Microsoft「Build 2026」発表まとめ 開発基盤の拡充から安全対策、ハードウェアまで
- 知らない番号からの着信、出る前に見抜く 話題の警察庁推奨アプリを試してみた
- AIによるコード生成、3年後は3倍超に AI普及で浮上する課題は
- マクロを使わずにExcelを自動化 ゼロから分かる「パワーピボット」超入門
- なぜ本番環境のAIは失敗するのか? Datadog調査で判明した「運用の壁」と打開策
- 「業務の前提そのもの」をどうアップデートする? IBMが説く「AXの要件」を考察
- Claudeが驚異の1100%成長でシェア17%に急拡大、急落するCopilot――米生成AIアプリ市場動向調査
- セキュリティ投資の拒絶と有事の責任転嫁 経営層が自戒すべき「人為的ジレンマ」の正体
- データ持ち出し対策とAI統制を強化 Snowflakeの新戦略
- 中小企業の7割がセキュリティに「自信」も、浮き彫りになる“基本対策”の盲点
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。