「感じる義手」は“ルークの義手”にどこまで近づけるか(3/3 ページ)
» 2005年11月15日 18時07分 公開
[中村文雄,ITmedia]
「Ratcar」プロジェクト――ラットの“脳”が車を運転する
満渕研究室では3年前、「Ratcar」プロジェクトを始めている。ラットの脳に神経インタフェースを装着して、脳の運動野からの信号を処理して車を動作させる実験だ。ラットを回転ホイールで走らせたり、Y字通路を通過させたりしたときの信号を解析処理して、その波形からラットの行動を予測する。また、レバーを押すと前に進む車の運転をラットに学習させた後、神経インタフェースからの信号だけで車を動かす実験も行っている。
「神経インタフェースから得られる信号の波形だけで、ラットの前後左右の動きを推測できるようになった」と鈴木博士は現状を説明する。ただし、神経インタフェースが安定しないために長期間の実験は難しい。今後、柔軟型剣山電極や流路付き神経プローブなどを利用して新たな実験をしていく予定だ。
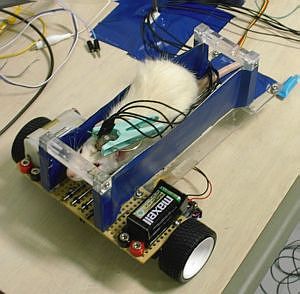 「Ratcarプロジェクト」の実験風景。脳に神経インタフェースを装着したラットが脳からの信号でRatcarを運転している
「Ratcarプロジェクト」の実験風景。脳に神経インタフェースを装着したラットが脳からの信号でRatcarを運転している流路付き神経プローブでは半導体プロセスが適用されているが、今後、ナノテクノロジーやバイオテクノロジーなどの技術を投入することで、さらに進化した神経インタフェースが開発されるだろう。しかしながら、鈴木博士も「腕に埋め込むタイプの神経インタフェースの完成には、10年以上はかかるだろう」と話すように、実用化までには多くの壁が存在する。“ルークの義手”を入手できる日はまだ遠いものの、その日は確実に近づいている。
資料提供:東京大学情報理工学系研究科 満渕研究室、東京大学生産技術研究所マイクロメカトロニクス国際研究センター 竹内研究室
関連記事
- 特集:コンテンツ時代の未来予想図
- 『私は、サイボーグ Kevin Warwick教授』
- 人生のやり直しが可能に? ライフログが紡ぐ未来
- ブラック・ジャックはロボット? 自律的な手術ロボットは必要か
- 新たなロボット工学3原則はコミュニケーションありき
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
SpecialPR
アイティメディアからのお知らせ
注目のテーマ

人気記事ランキング
- ニチレイへのサイバー攻撃はなぜ起きた? 「たまたま選ばれる」被害の構造
- 2050年5月13日の“不審な予定”に要注意 M365カレンダーを悪用する新マルウェア
- サイバー攻撃17%増 生成AIプロンプト「26件に1件」が高リスク
- Entra IDの標準認証がパスキーに SMS認証が使えなくなるのはいつ?
- 「Windows+R」は絶対に押さないで! 新入社員に贈るセキュリティの新常識5選
- Microsoft、7月の月例更新で約570件を修正 悪用済みゼロデイ2件にまず対応を
- AIを悪用した攻撃、どう対抗する? EDR導入の“次”にやるべきこと
- Windowsアップデートは「3日以内」に完了へ IT部門が工数をかけずに乗り切る方法は?
- 読者289人が選んだ「2026年に取りたいIT資格」とAI時代の学び直し
- 富士通・NVIDIAとロボット大手3社が協業へ フィジカルAI社会実装の具体策は?
あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。