「今度は垂直上昇!」――楽しく学べるUMLロボコン開催
ロボコンというと、「RoboCup」のように、ロボットそのものを設計・製作し、何らかの競技を行ってその成績を競うというものが一般的だ。しかし、オブジェクトテクノロジー研究所の主催で行われる「UMLロボットコンテスト」はひと味違う。
このコンテストはUML(Unified Modeling language。オブジェクト指向のソフトウェア開発における、プログラム設計図の統一表記法)の学習機会の一つとして2年前から始まったもので、ロボットによって行われる競技と同様に、UMLを用いたソフトウェア設計も評価されるのが特徴だ。
コンテストは、描かれた黒い線を光センサーでたどるロボットを「レゴ マインドストーム」で製作し、コースを走破する。短時間での走破を目的とする「スピード部門」と、レゴにロボットとしての動きを与える設計図であるUMLモデルを評価する「モデル部門」の2部門があり、参加者は優れたUMLモデルで速く走るレゴの製作を目指すことになる。
 コンテストの舞台になったコース。
コンテストの舞台になったコース。ロボットのハードウェアそのものは参加者共通のレゴを使用するため、そこでは優劣がつかない。そのため、UMLに沿ったソフトウェア設計で、いかにコースを正確かつ短時間で走破できるかに参加者は知恵を絞ることになる。
新趣向の「近道」が鍵に
3回目にあたる今回の参加チームは、40チームと過去最高。1周約20メートルのコースを内側と外側それぞれ2周し、良かった方のタイムが採用されるというルールでコンテストは行われた。なお、スタート2分以内にゴールできない場合はタイムアップでリタイア扱いになってしまう。
コースには緩急を織り交ぜたカーブのほか、勾配4%の坂道がある。加えて、今回からの新趣向として、外回りコースに限り、大幅にコースを短縮できることができる「近道」が用意された。
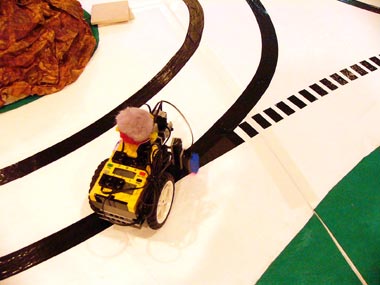 破線が新趣向の「近道」。これを認識して進むことができるかがタイム短縮の鍵
破線が新趣向の「近道」。これを認識して進むことができるかがタイム短縮の鍵ただし、その近道は実線で書かれた通常のコースとは異なり破線で書かれている。実線をたどってきたロボットが破線を感知してそちらに進路を取ることができれば、大幅に時間を短縮できるというわけだ。
第1回では単純にラインをなぞるだけのロボットが多く、コースを外れてしまった際の回復機能などが優劣を決めた。第2回はコースに坂道が設けられ、坂の上りを感じた場合、モーターの出力を上げるといった戦略がソフトウェアにも求められるようになった。果たして、新趣向が盛り込まれた今回はどうなったのか?
レゴを会場に持ち込んだ40チームが各2回ずつ、計80回の走行が行われたのだが、「UMLを使うのは今回が初めて」という参加者も多く、スタートした瞬間に止まってしまったり、カーブの途中で道を見失ってしまい立ち往生するロボットが続出するなど、なかなか大変な様子。
 スピードが出過ぎて、カーブで転倒してしまうロボットも
スピードが出過ぎて、カーブで転倒してしまうロボットもたびたび見受けられたのが、道を見失ったロボットが、何とかして走行ラインに戻ろうとセンサーを動かす姿。これには、チームは違っても、同じテーマで丹念にロボットを作り込んだ仲間としての連帯感からか、会場から盛んに励ましの声援が飛んでいた。
 道を見失ったロボットがでると会場が固唾を呑んで見守る。上手く復帰できるだろうか……
道を見失ったロボットがでると会場が固唾を呑んで見守る。上手く復帰できるだろうか……ただ、この仕組みが災いしてか、勢い余ってコースを逆走してしまうロボットがあったのはご愛敬。唯一の高校生チーム「勝工ロボ研」のロボットは、コースアウトもせず堅実な走りを見せたが、あまりに堅実すぎたのか規定時間をオーバーしてしまい、タイムアップで無念のリタイアだった。残念。
結局、トップバッターとして登場した、チーム「ムンムン」(NECソフトウェア北陸)が36秒7というタイムを記録し、スピード部門の優賞に輝いた。1周は約20メートルなので、秒速1メートルを超えたことになり、「これはすごいことだ」とコンテストの技術委員を務めた二上貴夫氏も驚きの表情だった。
今度は垂直上昇だ!
スピード部門は前述のようにチーム「ムンムン」(NECソフトウェア北陸)が優勝、モデル部門はチーム「KERM」(東横システム)が優勝にあたるエクセレント賞を受賞した。
二上氏は「3回目となって明らかにレベルアップしている」と全体を評しながらも、「UMLはソフトウェアの縮尺モデル、レゴは実世界の縮尺モデル。これを組み合わせることで、組み込みソフトを学ぶ際の大きな助けになる」とUMLロボコンの意義を述べた。
そして、最後には、まだまだ構想段階と前置きしながらも「飛行船ロボコンをしようかと考えている」と新プランを発表した。
 二川氏が発表した新プラン「飛行機ロボコン」のイメージ
二川氏が発表した新プラン「飛行機ロボコン」のイメージ飛行船ロボットの制御となると、航空力学までも含めた幅広い分野を取り入れたものにする必要があり、困難なものになることが想像されるが、会場からは「挑戦してみたい」という声が挙がっていた。二上氏は「勾配4%なんてものじゃない。今度は垂直上昇だ!(笑)」と、あくまでも楽しそうな様子。
「楽しく学んでいい仕事をしよう」
この言葉と共にコンテストは幕を閉じた。
 エキシビジョンには大会マスコット「キュボット」のデモンストレーションも
エキシビジョンには大会マスコット「キュボット」のデモンストレーションも関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。