飛行船ロボットが宙を舞う!?〜MDDロボット・チャレンジ(1/2 ページ)
また新手のロボットコンテストが誕生した。今度は「飛行船ロボット」。しかも自律動作するらしい。しかし、飛行船といえば、ただ浮かばせるだけでも難しいもの。どんな珍プレー好プレーが展開されるのか。飛行船担当記者が現地に飛んだ。
 まずは出場者一堂の集合写真。会場は東京・お台場の日本科学未来館。天井の高い会議場を使用し、飛行船が風に流されることのないよう、ドアを閉め切った状態で行われた。暑いです……
まずは出場者一堂の集合写真。会場は東京・お台場の日本科学未来館。天井の高い会議場を使用し、飛行船が風に流されることのないよう、ドアを閉め切った状態で行われた。暑いです……今回のロボットコンテストは、名称を「MDDロボット・チャレンジ 飛行船ロボットコンテスト」という。主催は情報処理学会ソフトウェア工学研究会で、「組み込みエンジニアのために実践教育の機会を提供するのが目的」。学生や研究者がチームを作り、MMD=Model Driven Developmentの名称が示すように、組み込みソフトウェアの設計モデリングと、その成果(つまり、飛行船の動作)を競い合う。競技とは別に、モデリングの審査まであるらしい。
 手作り感溢れる……というか、ホントに手作りの競技場。写真は、「サンダーバード」基地をイメージして制作されたリフトオフポイント(飛行船の出発地点)。ちなみに材料はLEGOブロックだ
手作り感溢れる……というか、ホントに手作りの競技場。写真は、「サンダーバード」基地をイメージして制作されたリフトオフポイント(飛行船の出発地点)。ちなみに材料はLEGOブロックだ飛行船は、ラジコンのように操縦するのではなく、組み込みソフトウェアによって“自律的”に動く。船体には、規定のマイコンボードと超音波送信機、および赤外線送信機が取り付けられ、基地(パソコンとマイコンボード)と通信しながら、決められたルートを飛行するのだ。
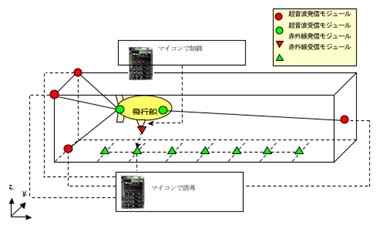 競技場の仕組み。赤い丸が超音波発信モジュールだ
競技場の仕組み。赤い丸が超音波発信モジュールだ一方の基地では、競技場内に設置されている複数の超音波発生源から飛行船までの信号到達時間(遅延)を計測し、飛行船の位置(座標)と姿勢を割り出す。この情報をもとに次の動作を決定し、超音波で飛行船に指示する。航行指令を受け取った飛行船は、指示通りにプロペラを回しつつ、受信時刻を赤外線で基地に返信する……この繰り返しで飛行船が動く仕組みだ。けっこう複雑。
ただ、目的が飛行システムの構築にあるため、飛行船そのものに対する規定は少ない。機体(エンベローブ)は自作してもいいし、市販の模型キットなどを流用しても構わないという。このため、今回は別のチームと機体を共有するチームも多かった。
このほか、電子制御系がC/C++言語でプログラミングできることとか、64bit浮動小数点演算のできるチップを組み込むとか、いろいろ条件はあるが、今回は割愛させていただく。難しいし。
競技はポイント制だ。発進した飛行船が、2つの“ウェイポイント”(風船)の半径1メートル以内を通過したら、それぞれ1ポイント加算。さらに、目的地のクレーターの中に着陸できたら3ポイントとなる。時間制限はないが、場外に出てしまったり、制御不能と判断されたらリタイアだ。
| チーム名 | 所属 |
|---|---|
| Mudskipper | 株式会社テクノロジックアート |
| can not!! | 東海大学電子情報学部コミュニケーション工学科 |
| ムンムン考房 | 金沢工業大学夢考房 NECソフトウェア北陸 |
| FC専士 | 専修大学ネットワーク情報学 キャッツ株式会社 富士通デバイス株式会社 |
| すりぃあみぃごず | 東海大学開発工学部情報通信工学科 |
| New Wave system | 株式会社メビウス |
出場した6チームは、いずれも大学の工学科や組み込み系ソフトウェア会社の有志によって構成されている。中には「ムンムン考房」や「FC専士」のように“産学共同”チームもあった。
国際救助隊、出動
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。