産総研ら、愛知博に“HRP”の技術を投入した2足歩行恐竜型ロボ
産業技術総合研究所(産総研)と新エネルギー・産業技術総合開発機構(NEDO技術開発機構)は共同で恐竜型二足歩行ロボットを開発、3月25日から開催される愛知万博にて展示する。展示場所は長久手会場「遊びと参加ゾーン」のロボットステーションで、会期中の185日間展示される。
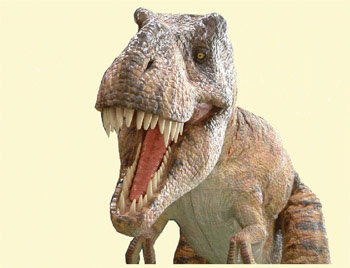 ティラノザウルス型ロボット
ティラノザウルス型ロボット展示されるのは肉食恐竜のティラノザウルスと草食恐竜のパラサウロロフスで、それぞれのサイズは前後方向3.5メートル、体重80キロ。内骨格構造を採用しており、ティラノザウルスは27軸、パラサウロロフスは26軸の関節を持ち、最新の学説を参考にした恐竜の二足歩行を再現する。
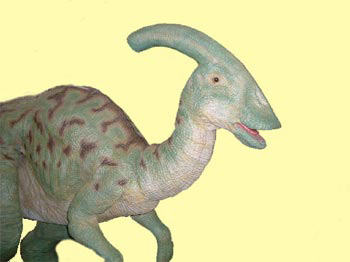 パラサウロロフス型ロボット
パラサウロロフス型ロボット二足歩行については両者が共同実施した「人間協調・共存型ロボットシステムの研究開発(Humanoid Robotics Project:HRP)」で開発された技術が活用されており、ハードウェアについても「HRP-2 Promet」などHRPに関連した実績を持つ川田工業が担当している。
産総研では二足歩行ロボットの産業化が難しいことについて、「歩行するだけでは商品価値が乏しい」「単価が高い」「転倒すると大きく破損する」という3点を挙げるが、今回のような恐竜型は、アミューズメント市場などでの需要が見込めること、内骨格構造によって転倒時の破損を低減できることなどから、「二足歩行ロボットのエンターテインメント分野への応用の第一歩となることが期待される」(産総研)としている。
また、開発された内骨格構造については恐竜型以外への応用も可能とされており、産総研では「歩くエンターテインメントロボット」として標準的な方式となることも期待しているという。

関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。