ルンバの動きは“ランダム”か?――実は“臨機応変”タイプだった:滝田勝紀の「白物家電スゴイ技術」(2/3 ページ)
「分散型とは、サブサンプション・アーキテクチャー(Subsumption Architecture:包摂的構造)に基づく一種の並列処理のことで、1つの行動が実行されている最中でも優先順位の高い行動が必要となれば、実行中の行動は一時中断され、優先順位の高い行動が先に実行されるという考え方です。“行動型の人工知能”とも呼ばれ、元々は昆虫の動きから考案されたものです」。

虫の動きとはどういうことか。「虫をみていると、例えば(足場の悪い)細かい砂の上や揺れる葉の上でもスムーズに動いてますよね? 状況に応じて、複数の脚がそれぞれ瞬時に動きます。それを昆虫全体で見ると、足の動かし方や広げ方などを変えているように見えるため、結果として自然にバランスをとり、まるで何事もない平地を動いているかのように感じるのです」。
「一見、複雑な動きをしているロボットも、実は1つ1つのパーツ――例えば稼働部である脚などが、それぞれシンプルな動きをしていて、それを組み合わせたにすぎません。ロドニー・ブルックスは、そうした1つ1つのパーツに端末としての制御機能を持たせ、それぞれの端末に状況に応じた動きをさせたほうが良いと考えました。何か起きたときに反応するまでのスピードが早く、多種多様な情報が同時に流入してもバグが発生しにくいからです」。
これを理解する上で、下図サブサンプション・アーキテクチャーの考え方を示す図を見てもらいながら、ロボットの動きをイメージしてほしい。曽根氏は話を続ける。
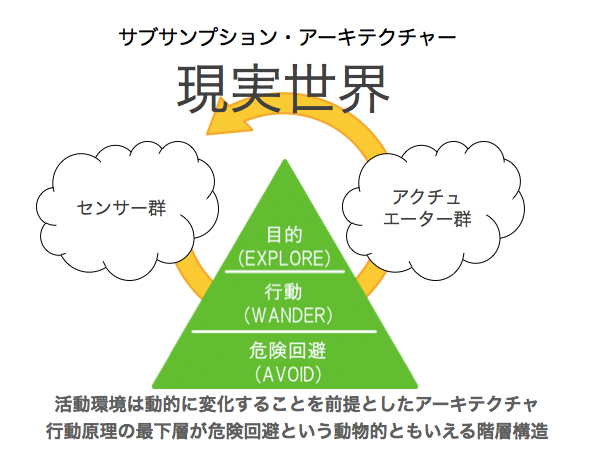
「まずロボットは、それは図の中段に書かれていますが、“行動する”ために存在します。ロボットは、なにかをするために生み出されるものですが、共通して、どのロボットもさまざまな動きができることが前提です。そのためにさまざまなパーツが組み合わさっていたり、センサーが搭載されていたりして、ロボットは状況を把握しながら、行動することができるのです」。
とはいえ、行動していても、現実世界は動的な状況であり、常に目の前の状況は変化する。それは人間にとってもロボットにとっても同じことだ。「目の前に急に穴があるとき、そのまま進んでしまったら落ちてしまいますし、動いていればなにかに衝突するといった危険が迫ることが常にあります。これを回避できないと、ロボット自体が壊れてしまったり、動かなくなってしまうので、サブサンプション・アーキテクチャーの考え方では、図の一番下に書かれているとおり、“行動する”より、“危険回避する”という動きが優先されるのです。この行動原理は、実は人間や動物と同じです」。
そのうえで、ロボットはそれぞれの目的を遂行するという。「つまり、危険を回避しながら行動することで、図の一番上に書かれている通り、初めてロボットは科せられた“目的を遂行”できるのです。これをルンバにあてはめますと、“しっかりと部屋を掃除する”という目的を達成するため、変化する目の前の状況、つまりダイニングテーブルのイスの下にいるとか、目の前に階段が迫って来たとかを常に把握しながら行動することが一番大切です。そのような考え方に基づいて作られた人工知能で動いているのがルンバなのです」。
さらに、この人工知能との考え方と同様に、ルンバの動きを知るのに重要なものが、高速応答プロセスiAdaptだ。「ルンバは部屋を掃除し出すと、最初の10分間でルームサイジング、つまり部屋の広さや配置、汚れ具合などを測り、この部屋を掃除するためにはどのぐらいの時間が掛かるかを算出します。そのうえで、サブサンプション・アーキテクチャに基づいて開発された人工知能が、センサーから送られて来たシチュエーションに関するデータや、経験(ファームウェア上のデータ)を元に、もっとも最適な動きを瞬時に選び出し、行動に移します。この高速で行われる思考プロセスこそがルンバ独自のiAdaptなのです」。
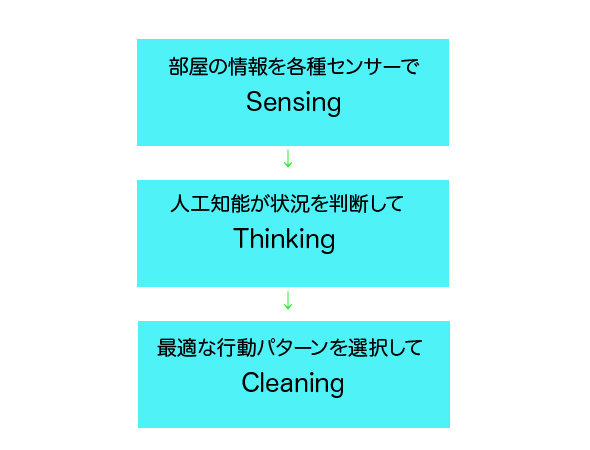
ルンバは、部屋の壁、段差、家具などの障害物、さまざまな動作環境を、数十ものセンサーから送られる情報をもとに毎秒60回以上も瞬時に考え、状況を判断する。そして40以上もの行動パターンから最適な動作を速やかに選択するのだ。なぜ、そのようなことが可能になったのか。実はルンバを開発したiRobotは、元々アメリカ政府やNASAなどの仕事を請け負い、人命救助ロボットや人間の代わりに危険なことをやってくれる探査ロボットなどを開発してきた会社だ。そしてルンバの動きの大元となっているのが、「Fetch」(フェッチ)と名付けられた地雷探査ロボットだった。
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。