“心”から人間を支えるロボットとなれるか?――アザラシ型ロボット「パロ」の秘密(2/5 ページ)
ペットロボットとして当たり前の機能を搭載する
柴田氏が「人間と共存するロボット」の研究を開始したのは1993年。当初、柴田氏は、感触センサーにキーボードを使い、その信号で尻尾が上下する仕組みを製作して実験している。キーボードの触り方で尻尾の振り方を変えることによって、「本物の犬の尻尾と感じる」ように工夫を凝らした。人間とロボットが長期間にわたり関係を続けるために、ペット動物のような反応をするロボットを研究したのである。その後、聴覚と視覚のセンサーを組み合わせるなど、実験は複雑なものとなっていくが基本は変わらない。1995年から3年間、柴田氏はマサチューセッツ工科大学の人工知能研究所で「感情的人工生物プロジェクト」を創設して研究を深める。
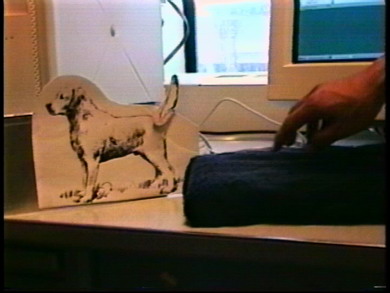 尻尾を振るだけの犬のようなロボットの実験。手でセンサー代わりのキーボードを触ると犬の尻尾が上下する
尻尾を振るだけの犬のようなロボットの実験。手でセンサー代わりのキーボードを触ると犬の尻尾が上下する1998年に柴田氏は、セラピーを目的にしたアザラシ型ロボット「パロ」の第1号を完成させた。柴田氏には当初から「ラグビーボールより少し大きくて抱きやすく、毛がふさふさしていて暖かみがある」というロボットのイメージがあり、それがアザラシという動物とぴったり一致していた。
当初からアザラシ型であったことは柴田氏の慧眼である。実はネコ型のロボットも同時に製作したが、その評判はあまり良くなかった。ネコ型ロボットに触った人は最初、良い評価を与えるが、20分もすると「本物と比較すると良くない」と評価を下げる。その反対にアザラシでは、最初の評価よりも後での評価が良くなる傾向があった。誰もアザラシに触ったことがないので比較する対象がなく、期待が少ないからだ。「名前は知ってはいるが、触ったことはないカワイイ動物」というアザラシのイメージは、セラピーロボットにぴったりであった。
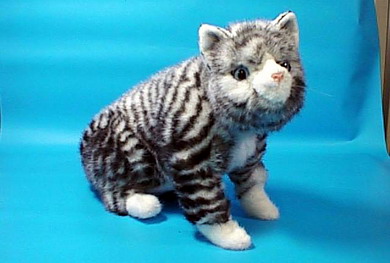 パロの開発当初に並行して開発されたネコ型ロボット
パロの開発当初に並行して開発されたネコ型ロボット第1世代と第2世代のパロは“動き回った”が、第3世代では移動する機能を削除した。老人や病気の子供を対象にしたセラピーロボットが動き回ってはセラピーにならないからだ。2000年に行われた筑波大学付属病院の実験は、パロの安全性と耐久性をテストする絶好の機会となり、パロは子供が乱暴に扱っても壊れないロボットへと改良される。特に衛生面では抗菌加工、脱毛防止に細心の注意を払い、2001年に完成した第6世代ではほぼ基本的な性能が整った。冒頭に紹介したロンドンの展示会に出品されたのは、この第6世代のパロで、2カ月間の会期中、故障することなく来場者と触れあい続けた。
 スウェーデンのカロリンスカ病院でのパロによるロボットセラピー
スウェーデンのカロリンスカ病院でのパロによるロボットセラピー例えば、第5世代のパロでは目尻を上下する機能があったが、あまり効果が見られないのでまぶたの開閉機能だけが残された。そのような機能と効果のチェックを行って、それをパロの開発に生かすことでパロは着実に進化していった。特にフェイススケールという顔マークによる段階評価は子供でも老人でも簡単に答えられる工夫がされており、重要なデータ収集に役立っている。
2002年に柴田氏は本物のタテゴトアザラシの赤ちゃんと触れあうためにカナダを訪れており、パロには本物のタテゴトアザラシの鳴き声が入っている。柴田氏は「本物の良いところをパロに取り入れて、触り心地などを改良しました」とパロの手触りに細心の注意を払ったことを説明する。第7世代では量産化するために部品のモジュール化などが進められた。そして、2005年3月に第8世代となるパロが発売され、同年10月にはゴールド色のパロが発売されることになる。
 2005年10月に販売開始されたゴールド色のパロ
2005年10月に販売開始されたゴールド色のパロCopyright © ITmedia, Inc. All Rights Reserved.
アイティメディアからのお知らせ
注目のテーマ

人気記事ランキング
- ニチレイへのサイバー攻撃はなぜ起きた? 「たまたま選ばれる」被害の構造
- 2050年5月13日の“不審な予定”に要注意 M365カレンダーを悪用する新マルウェア
- サイバー攻撃17%増 生成AIプロンプト「26件に1件」が高リスク
- Entra IDの標準認証がパスキーに SMS認証が使えなくなるのはいつ?
- 「Windows+R」は絶対に押さないで! 新入社員に贈るセキュリティの新常識5選
- Microsoft、7月の月例更新で約570件を修正 悪用済みゼロデイ2件にまず対応を
- AIを悪用した攻撃、どう対抗する? EDR導入の“次”にやるべきこと
- Windowsアップデートは「3日以内」に完了へ IT部門が工数をかけずに乗り切る方法は?
- 読者289人が選んだ「2026年に取りたいIT資格」とAI時代の学び直し
- 富士通・NVIDIAとロボット大手3社が協業へ フィジカルAI社会実装の具体策は?
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。