マイクロ展で「夢とロマン」探し、ロボットの“力こぶ”に出会う(2/2 ページ)
会場ではこの積層型静電アクチュエータを用いた魚型ロボットが絶縁溶液の中を遊泳するビデオが紹介されていた。
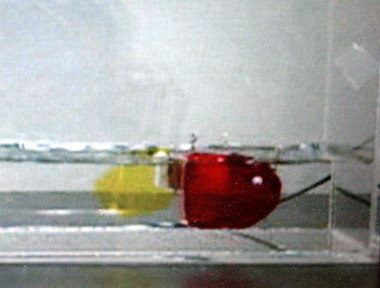
課題は動作させるために高電圧が必要な点。現在一番小さな2ミリ角の積層型静電アクチュエータでも500ボルトが必要で、実験で遊泳させた魚ロボットではなんと1400ボルトの電圧を使用している。
「今0.5ミリ角のものを開発中。小さくしていくことで単体での電圧を下げ、それを多数積層させることでパワーを発生させる。微細化技術とともに折り重ねる技術も必要なので大変。ただこれらをクリアすれば、現在は金属のカタマリのようなモーターを使っているロボットの動力を劇的に軽くでき、俊敏かつ繊細な動きのできるロボットが可能になる」(担当者)
人工筋肉は数年以内に実用化
米国カリフォルニア州に本部を置く非営利独立研究機関「SRI International」が紹介していたのは、電圧をかけると人間の筋肉のように変形する「人工筋肉」だ。
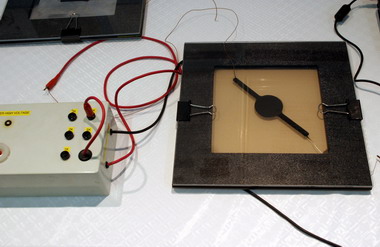 会場では実際に人工筋肉に電圧をかけて変形させるデモンストレーションが行われていた
会場では実際に人工筋肉に電圧をかけて変形させるデモンストレーションが行われていた 人工筋肉が膨張する様子
人工筋肉が膨張する様子「ポリマー膜を柔軟な電極素材で挟んで電圧をかけると、電極それぞれに蓄えられたプラス/マイナスの電荷が引き合って電極間に引力が生じ、ポリマー膜が押しつぶされて面方向に膨張する。“柔らかいコンニャクを板で挟んで両端から押すとつぶれて広がる”といったイメージ」(担当者)
人工筋肉を応用することでロボットの手足を動作させることが可能なほか、膨張/収縮の動作でポンプのような働きをさせることもできる。また、逆の発想で人工筋肉に力を加えることで発電機にもなる。ポリマーと炭素を中心とした電極素材で構成しているので、低コストで高性能を出せるのが最大の特徴だ。
「ピエゾ(圧電)アクチュエータではこのような大きな変形は生み出せないし、電磁アクチュエータでは応答速度や出力の面で劣っている。だがこの人工筋肉は、出力、歪み度合い、応答速度などすべての面で優秀で欠点がない。人工筋肉は数年以内に商品化の予定。当初はデジカメのズーム/フォーカス機構など、コンシューマエレクトロニクス製品に使われているアクチュエータの代替品として市場に登場すると見ている」(担当者)
“粗さ感”など物体の手触りを表現
東京大学大学院 先端メカトロニクス研究室が展示していたのも、静電アクチュエータ。やはり東工大と同様に高出力型をアピールしていたのだが、もう1つ、この静電アクチュエータの応用として紹介していたユニークな技術が「触感インタフェース」だ。
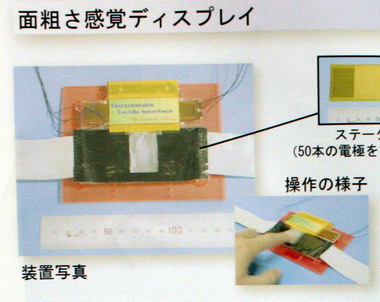
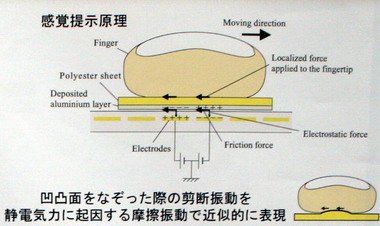
触覚という感覚の要素に含まれている「皮膚感覚」を、静電気力による摩擦振動で近似的に再現することでさまざまな“手触り”を表現しようというもの。
「ポリミドフィルムに電極がプリントされており、電圧を加えると発生する推進力が横の摩擦運動を生む。指の位置を検出してこの推進力をうまく切り替えることで、平面のパネル上にザラザラ感を出すことができる」(担当者)
インターネットを使った電子商取引などで、遠隔地でも商品の素材感などを確かめることができるといったシステムに応用したり、バーチャルリアリティなどでよりリアルな表現を可能にする。従来のGUIに“触感”という新しいインタフェースと組み合わせることで、より優れた操作感を生み出すこともできそうだ。
同研究室ではこのような皮膚感覚のほかに、ペルチェ素子による温度制御で材質の違いによる温度感の違いを表現できる「温度感覚ディスプレイ」の開発も行っている。
「木材と金属の手触りの違いは温度感覚によるところが大きい。将来的には、触感インタフェースと温度感覚ディスプレイを組み合わせて、より物体の手触りを表現できるようなシステムも作っていきたい」(担当者)
人肌の温もりがある鮫肌のロボット、なんてのも面白そうだ。
関連記事
- 100円玉サイズのガスタービン発電機がケータイに搭載される日
- 5年後には現実になる「ミクロの決死圏」
- “極小”犬型ロボットの駆動システムは、デジカメのピントも合わせる――マイクロマシン展
- 時代は小型・軽量から、極小に──マイクロマシン展
- 歩くだけで発電!──SRIインターナショナルの靴発電システム
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。