第2回「いきなり大事件」:ロボットキット「Weird-7」を作りました(4/5 ページ)
» 2005年10月11日 16時26分 公開
[こばやしゆたか,ITmedia]
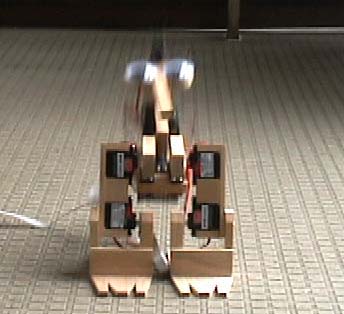
 歩かせてみた。
歩かせてみた。電源を入れた状態から、「ホームセット」、「前」のモーションだ。「前」を1回押すと、1歩あるくという仕組みなので、何歩も歩かせるときには、「前」を連続して押す。ちゃんと動いた。苦労が報われた気持ちの一瞬。やったね。
「仰向け寝」のはずだったのだけど、寝たあと横向きになってしまった。ホームポジションのバランスが悪いのかなあ。これは引き続き起きあがれない。
 横向きになってしまった。
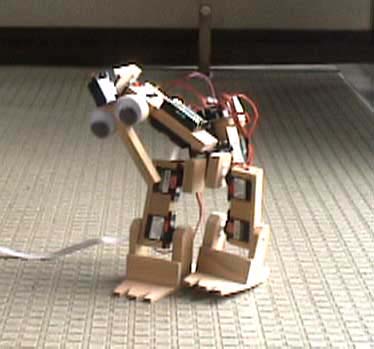
横向きになってしまった。調整はあとですることにして、とりあえずは「起きあがり」。
 「起きあがり」
「起きあがり」プリセットされていないモーションは、Weird-7.exeでモーションスクリプトファイルを開いてから「モーション開始」することになる。これはそのなかから大技「前方回転起きあがり」(でんぐりがえし)だ。
 大技「前方回転起きあがり」。
大技「前方回転起きあがり」。無線ユニットを取り付ける
Weird-7には別売りで無線ユニットが用意されている。純粋にシリアルを無線にしたというものなので、Weird-7からシリアルケーブルを抜いて、ケーブル側に送信機、Weird-7側に受信機を取り付ける。
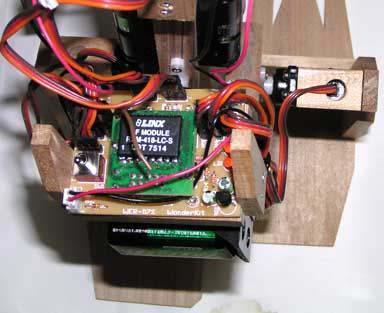 緑色の部分が受信機基板。制御基板のシリアルコネクタに直接取り付ける。途中で切れてるように見える茶色のケーブルはアンテナ
緑色の部分が受信機基板。制御基板のシリアルコネクタに直接取り付ける。途中で切れてるように見える茶色のケーブルはアンテナケーブルがなくなったことでとってもすっきりする。モーションの途中でケーブルを踏んで転んじゃうなんてこともあったのだけど、それがなくなるだけでうれしい*2。
*2ただしRobo-oneのような競技会会場では、無線のトラブルというのは日常茶飯事である。ああいう会場はノイズだらけなのだ。
最後の大事件。骨折
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
SpecialPR
あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。