fuRo、新型レスキューロボット「Hibiscus」を披露(1/2 ページ)
千葉工業大学未来ロボット技術研究センター(fuRo)の小柳栄次副所長と吉田研究員の開発チームは6月5日、瓦礫の上を安定して走行できる新型レスキューロボット「Hibiscus」を公開した。fuRoが実用化を前提に開発しているレスキューロボットの8号機。倒壊した家屋やビルに入り、赤外線熱感知センサーやサーモグラフィを使って被災者を探索する。
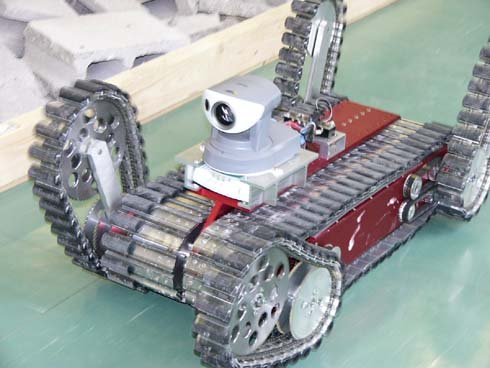 アクシスのネットワークカメラ「AXIS 213 TPZ」やサーモグラフィを搭載した「Hibiscus」。CPUはSH3、OSはNetBSDがベースだ
アクシスのネットワークカメラ「AXIS 213 TPZ」やサーモグラフィを搭載した「Hibiscus」。CPUはSH3、OSはNetBSDがベースだ
ロボットのサイズは、370(幅)×650(長さ)×180(高さ)ミリ。本体に6つのモーターを搭載し、キャタピラ状の“クローラー”を駆動して移動する。前後左右には“フリッパーアーム”とよばれる可動型のクローラーがあり、これを腕のように使って障害物をよじ登る。重量は、リチウムポリマーバッテリーを含めて22.5キロ。3700mAhのバッテリーで1時間程度の探査活動が行えるという。
5月に「ROBOCUPジャパンオープン」で優勝した先代の「03」(ゼロスリー)と比べると、走行スピードが2倍の毎秒1.1メートルとなった。一方、フリッパーアームを使って障害物を乗り越えるスタイルは変わらないため、登坂能力45deg、段差踏破能力40センチメートルというスペックは同じだ。ただし今回は、中越地震の被災地などで実際に運用した経験から、さまざまなシチュエーションに対応できるように改良されている。
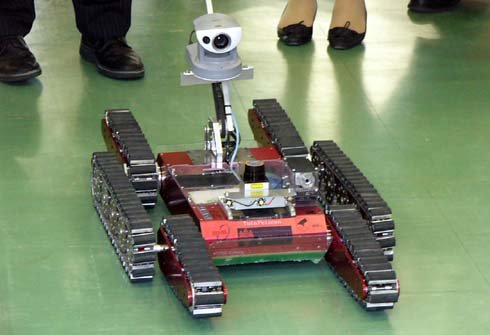 従来モデルの「03(ゼロスリー)」
従来モデルの「03(ゼロスリー)」
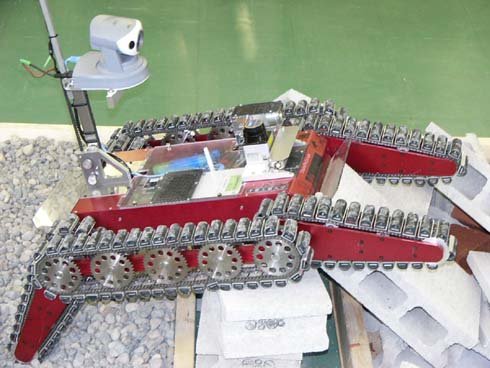
 「Hibiscus」を上から見たところ。4つのフリッパーアームはすべて独立して動かせる
「Hibiscus」を上から見たところ。4つのフリッパーアームはすべて独立して動かせる
たとえば、「03では、ロボットの“お腹”にクローラーがなく、ここが障害物に乗り上げると動けなくなることがあった」(小柳所長)。また、7号機はクローラーの先端が細く、瓦礫などの隙間などに挟まることも多い。そこでHibiscusでは、ロボット全体をクローラーが覆うように配置を見直し、クローラーのフロント径を拡大した。さらに「03は前後のクローラーは独立していたものの、左右は同期して動く仕様」を改め、前後左右のクローラーを完全に独立して動作させる。
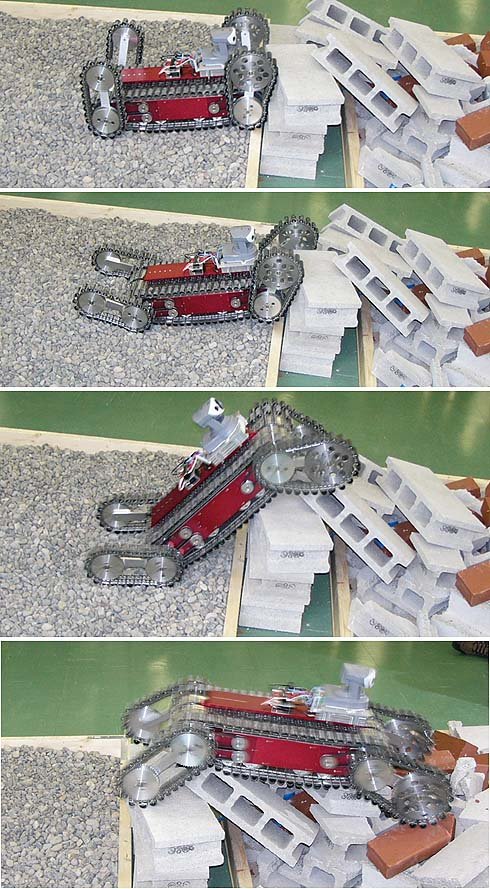 デモンストレーションでは、砕いたブロック塀や砂地を移動してみせた。ブロック塀が積まれた場所も裏側のクローラーを使ってうまく乗り越える
デモンストレーションでは、砕いたブロック塀や砂地を移動してみせた。ブロック塀が積まれた場所も裏側のクローラーを使ってうまく乗り越える
 一方、03はブロックがお腹に引っかかって動けなくなってしまった
一方、03はブロックがお腹に引っかかって動けなくなってしまった
Copyright © ITmedia, Inc. All Rights Reserved.
この記事の著者
関連記事
こんなメディアも見られています
ITmedia NEWSに関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
本日の新着記事
アクセスランキング
-
1
防衛省の「クーラー300台」投稿動画でビックカメラのトラックが注目を集める 同社「販売用の在庫を迅速に提供」
-
2
セブン&アイ、共通会員IDのPayPay統合を正式発表 ソフトバンクや三井住友カードなどが計3000億円出資
-
3
ドコモ、ahamoを30→40GBに増量 8月1日から 料金据え置きの新キャンペーン
-
4
一般消費者が「空調服」と書いたら商標権侵害? 公式Xの注意喚起が波紋、弁理士の見解は
-
5
ソニー、タムロン買収提案の狙いを説明 「イメージング事業の発展につながる」
-
6
タカラトミー、デュエマアプリで個人情報漏えいか 最大15万5000人分 氏名や住所など閲覧の恐れ
-
7
「文スト」スマホゲーム、きょう告知→あす終了 突然のサ終にユーザー混乱 運営元の廃業で
-
8
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
9
「楽天ドライブ」アプリから「データ漏洩」「ハッキングした」通知? 運営元「緊急調査中」「通知を開かないで」
-
10
「不気味の谷を越えた」? 中国の美男美女型ロボット「U1」話題 286万円から
ITmedia NEWS SNS
インフォメーション
注目情報をチェック
ITmediaNEWSをフォロー
あなたにおすすめの記事PR