小惑星に挑んだ「MINERVA」はこんな大きさ
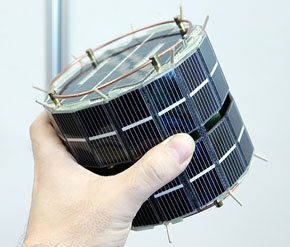 実物と同じ大きさ・重さのMINERVAの模型
実物と同じ大きさ・重さのMINERVAの模型
2005年11月、地球から約3億キロの小惑星「イトカワ」に到達した探査機「はやぶさ」(MUSES-C)には、イトカワの表面を調べるために搭載された探査ローバー「MINERVA」が搭載されていた。12(直径)×10(高さ)センチ・591グラムという、間近で見ると拍子抜けするほど小さな円筒形だが、そこには日本の技術が詰め込まれていた。イトカワに着陸を試みたが果たせず、「太陽を周回する世界最小の人工惑星」として今も宇宙をめぐっている。
「はやぶさ」は宇宙科学研究所(現JAXA宇宙科学研究本部)が2003年5月に打ち上げ、2年半かかってイトカワに到達。表面の破片を持ち帰ろうと試み、今は地球への帰り道をたどっている。
MINERVA(MIcro/Nano Experimental Robot Vehicle for Asteroid)はイトカワから分離して独自に小惑星表面を探査するために開発された。地球からのリモートコントロールはできないため、小惑星表面を自律的に探査できるようにした。
特徴は、「ホッピング」で移動する仕組み。モーターで内部の円板(ホイール)を回転させ、その“勢い”で微少重力下をはねるように移動する。上下に備えた“足”のような突起は、ホップする時の足がかりになる。どんな姿勢で着地しても、1000分の1Gならこの仕組みでホップして移動できるという。

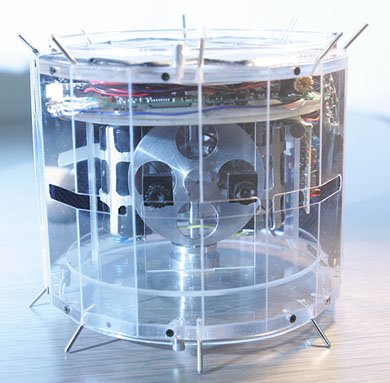 スケルトンモデルの中心にホイールが見える
スケルトンモデルの中心にホイールが見える
表面に貼り付けた太陽電池パネルで発電できるのは2ワット。モーター起動時には足りないため、電気2重層コンデンサーを初めて採用した。カメラは160×120ピクセルの画像を連続撮影。宇宙が映っているだけの画像は消去する機能を備え、2Mバイトフラッシュに保存して9600bpsで「はやぶさ」に送信する。6個のフォトダイオードも備え、太陽光を検知して自分の向きも分かる。
制御には日立製作所(現ルネサステクノロジ)の「SH-3」マイコンが使われた。電磁波試験に通ったものだが、特別な宇宙仕様ではなかったという。コンデンサーやカメラなども国産の民生品を採用するなど、宇宙用部品は太陽電池くらいだという。「この中には日本の技術がたくさん入っている」(JAXA宇宙科学研究本部宇宙探査工学研究系の久保田孝助教授)
ロボットと小型化は日本のお家芸だ。JAXAは今年以降、ロボットの宇宙利用を進めていきたい考え。月面を走行する探査ローバーの開発や、MINERVAをさらに小型化したマイクロロボットによる探査計画なども考えている。MEMSなど日本の技術を駆使したマイクロロボットを他国のロケットに載せて打ち上げてもらったり、人工衛星に積んでおいて異常時には飛び出して調査する──など、構想は広がる。
3月28日には、公開シンポジウム「ロボットが拓く宇宙開発のNEXT STAGE」を日本科学未来館(東京・江東区)で開く。宇宙飛行士の若田光一さんらが参加し、ロボットによる宇宙開発の可能性を紹介。広く一般や企業からの協力を求めていく。MINERVAの実物大模型や月面ローバーなども展示する。
参加は無料だが、事前申し込みが必要。詳細はWebサイトで。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
こんなメディアも見られています
ITmedia NEWSに関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
本日の新着記事
アクセスランキング
-
1
タムロン、ソニーからの買収提案認める 特別委員会を設置して検討
-
2
陸自が「イオンモール熊本」内部をドローン撮影 防衛省が映像公開
-
3
熊本「通れた道」マップ、トヨタが公開 ホンダも「通行実績情報マップ」
-
4
PayPayアプリで熊本地震への寄付が可能に 最短3ステップ・1円から
-
5
光学25倍ズームのソニー「RX10 V」はもう“レンズ一体型α” 1台で何でも撮れそうな万能感に浸れるぞ
-
6
「Xが情報収集に役立たない……」熊本地震で不満の声続出 「Twitterを返して」
-
7
TSMC熊本工場、段階的に通常操業へ 熊本の地震で一時中断、従業員の無事確認 台湾報道
-
8
熊本で非常時Wi-Fi「00000JAPAN」発動中 KDDIが無料開放、他社ユーザーも利用可
-
9
「痺れるほどにミスを繰り返す」Gemini 3.6 Flashは変わった? 公開から1週間、当初のおバカ回答を今検証する
-
10
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
ITmedia NEWS SNS
インフォメーション
注目情報をチェック
ITmediaNEWSをフォロー
あなたにおすすめの記事PR