人を乗せて階段昇り降り 2足歩行ロボ、実用化にまた一歩
早稲田大学とテムザックの人が乗れる2足歩行ロボが、人を乗せたまま階段を昇った。人を乗せたまま階段を昇り降りできるロボットが公開されるのは世界初だという。
「WL-16RII」の階段昇降は4月27日、早大ヒューマノイド研究所分室がある福岡市内のロボット展示・研究施設「ロボスクエア」で披露された。


WL-16RIIは、直動アクチュエーターを並列に配置した「パラレルリンク機構」を採用したのが特徴。従来の2足歩行ロボの多くで採用されている、アクチュエーターを直列に配置した「シリアルリンク機構」よりもパワーと剛性が高い。しかし可動範囲が狭いため、階段昇降など大きな動きには不向きとされてきた。
今回、足を振り出す方向に腰をねじり、パーツ同士がぶつからないようにすることでこの問題を解消。高さ20センチの階段昇降に成功した。階段の高さや幅などを検知するセンサーは搭載していないため、動きをあらかじめプログラムしておき、安全に昇降できるようにした。
今後は、ロボット特区である福岡市内で実証実験を行い、実用化につなげたい考えだ。「例えば、特区内の階段に、段の高さや幅を記録したRFIDを仕込み、WL-16RIIにRFIDリーダーを搭載すれば、街の階段を自由に歩けるだろう」と、早稲田大学理工学部の高西淳夫教授は展望を語る。
テムザックの高本陽一社長は「2010年までに、人を乗せるエンターテインメントビークルとして売り出したい」と話し、活用例として、馬の代わりにロボットに乗って競技する「ロボットポロ」を挙げた。
「一般向けのエンターテインメントロボットとして普及し、価格が下がれば、障害者を支援するロボットも開発したい」(高本社長)。足の機構だけをパーツとしても売り出すことも考えている。
発表会には福岡市の山崎広太郎市長も出席し、「福岡のロボット研究をさらに加速させたい」とコメント。WL-16RIIの乗り心地を試していた。
 恐る恐るWL-16RIIに乗り込む山崎市長
恐る恐るWL-16RIIに乗り込む山崎市長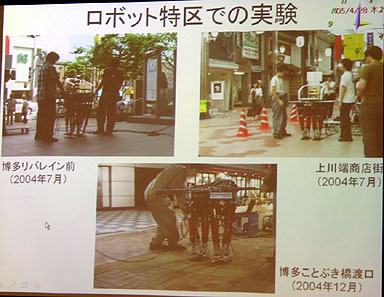 特区での実験の様子
特区での実験の様子2足歩行は「人を理解し、助けるため」
「2足歩行ロボ実用化の方向性が見えてきたのは本当に嬉しい。私が研究を始めた1970年代、人型ロボットの研究者はほとんどおらず、他の研究者からは『鉄でできた塊が歩くはずがない』とバカにされた」と高西教授は振り返る。早大ロボット研究の第一人者である故・加藤一郎教授のもとで、高西教授は1970年代からロボット研究を手がけてきた。
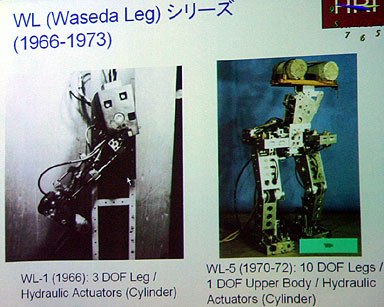
WL-16RIIの「WL」は「Waseda Leg」の略。1本足の1号機「WL-1」が誕生したのは1966年だった。1970年、2足歩行の「WL-5」を開発。メモリ32Kバイトの「HITAC」に接続し、Fortranで制御していたという。「歩幅は10センチ。1歩踏み出すのに45秒かかった」(高西教授)
その後、制御用コンピュータは高度化し、パーツも軽量で剛性の高いものが登場。1995年に開発した「WL12」は、これまで足だけだったロボットに上半身を付け、全身でバランスを取りながら歩けるようにした。ホンダの「ASIMO」やソニーの「QRIO」もWL-12と同じ仕組みで歩いているという。
 WL12
WL12高西教授はヒューマノイド研究を続ける理由を「人間をよりよく理解し、人を支援する機器の開発に役立てるため」と説明する。早大の2足歩行ロボ研究室の隣では、義足の研究が行われているという。人間の歩き方の研究がヒューマノイド研究に生き、ヒューマノイド研究が人間用の義足研究に生きる。
「例えば、車の衝突実験は、今は人形を使ってやっているが、ロボットで代替すれば、搭載したセンサーを使ってさまざまな角度から衝突の影響を計測できる」(高西教授)。2足歩行ロボ「WABIAN」を使い、歩行支援機のテストを行ったこともある。人型ロボットの活用範囲は、人々が思っているよりも広いと高西教授は話した。
関連記事
- 早大とテムザックが開発した“人を載せて2足歩行するロボット
早稲田大学理工学部高西淳夫研究室とテムザックが、世界初の“人間を搬送する2足歩行ロボット”を開発。ロボットが歩くための脚部の仕組みに、従来の2足歩行とは違う機構を採用することで、重く不安定な人間を載せながらも安全に歩くことができるという。 - インテリアになる留守番ロボット「ロボリア」〜テムザック三洋
テムザック三洋は12月8日、新型留守番ロボット「T7-4 ロボリア」のプロトタイプを公開した。「深海のクラゲ」がモチーフという丸みを帯びた本体に3色LEDを内蔵。フロアライトにもなるという。 - 巨体がうなるぞ、ドアとるぞ。その名は「援竜」
身長3.45m、体重5t。大型レスキューロボット「T-52 援竜(えんりゅう)」の発表会が、東京三鷹の消防研究所で行われた。木材や鉄柱をひょいっとつまんでどかし、乗用車のドアをあっさり引きちぎる。とっても頼りになる奴だ。 - 「番竜」新型を三洋が独自開発、レンタル開始
- 2003年、「番犬」はロボットになる
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。