東大、オープンソースの「四足歩行ロボ」 部品はオンライン発注可 階段を上がる姿など披露(1/2 ページ)
東京大学は4月1日、同学の研究グループがオープンソースの四足歩行ロボット「MEVIUS2」を開発したと発表した。オンライン発注サービスで調達した金属部品によって機体を機体を構成することで、従来のオープンソースロボットに比べ耐久性を強化。デモ動画では、階段を上がる姿などを披露している。
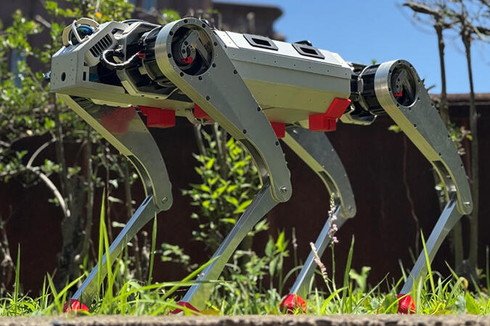 MEVIUS2(出典:プレスリリース)
MEVIUS2(出典:プレスリリース)
これまでオープンソースの四足歩行ロボットは、機体を3Dプリンタで製作する仕様だったため、サイズや耐久性に課題があったという。
そこでMEVIUS2では、溶接・切削した金属部品のオンライン発注サービスを活用し、機体を構成できる設計にした。これにより、長さ約73cm、幅約38cmのサイズを実現し、LiDARやHDRカメラなどのセンサー類を搭載できるようにした。
MEVIUS2は、機体の周囲の環境をマルチモーダルに認識できるほか、さまざまな不整地を移動できるという。公式サイトのデモ動画では、屋外の階段や斜面を移動する姿などを確認できる。
MEVIUS2の設計データやソフトウェアは、GitHubで公開中。個人の研究者でも四足歩行ロボットを自作できるようにすることで、ロボットの自律動作などに関する研究開発を後押しする。
MEVIUS2の開発は、東京大学次世代知能科学研究センターの河原塚健人講師らの研究グループが手掛けた。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
「“社長AI”って意味ある?」→言った本人も手のひら返し 幹部の9割が高評価したNTTドコモビジネスの「AI小島社長」開発録
-
2
ひろゆき氏「SIer衰退予測」、AI代替の「逆転現象」の理由 2026年に生き残るエンジニア“4つの役割”
-
3
解剖・孫正義氏の「ガチョウ論」 「ソフトバンクG株価が低過ぎ」主張を信じてよいのか
-
4
AI避けて「人間にだけ届く」広告配信へ、博報堂DYが新会社設立 虹彩認証「World ID」活用
-
5
日立、メインフレーム事業から撤退へ ハード製造終了から9年後の決断
-
6
国産LLM「Sarashina3」登場 高品質データ、独自検証で日本語能力を強化 ソフトバンク傘下
-
7
GitHub、AIによる雑なプルリクエストを抑制へ ユーザー当たりのプルリク数に上限を設定できる新機能
-
8
ルネサスが2035年の売上高3倍増も視野に、AIで3段階の成長を目指す
-
9
AIは設計者を置き換えるのか Autodesk幹部に聞くCADと設計データの未来
-
10
日本の「完璧主義」から脱却し中国ヒューマノイドにどう立ち向かうか
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR