“ドラえもん”を開発することの難しさ 〜バンダイ(2/2 ページ)
ドラえもん・ザ・ロボットでは、足の部分に取り付けられた車輪で移動する。このため、車輪は地面に着いていても、“足の部分”は「浮いていると、いえないこともない」(大江氏)。
 確かに、そう言われると、そんな気もする
確かに、そう言われると、そんな気もするとはいえ、ドラえもんには多様な設定がある。“標準規格”も明確に規定されており(下表参照)、これに完全に準拠することは難しい。元の設定にどこまで近づけるべきか、判断が分かれるところだ。
| 名称 | ドラえもん |
|---|---|
| 身長 | 129.3センチ |
| 体重 | 129.3キロ |
| 3サイズ(B/W/H) | 129.3/129.3/129.3 |
| ネズミから逃げるときの速さ | 時速129.3キロ |
大きさに関していえば、大江氏は開発の過程で、試しに2分の1スケールのロボットを作ったと話す。
「ただ、こんなことをいうのもなんだが、ちょっと肉厚で、だいぶデカイ」。第1弾のサイズは、235×265×175ミリ。ひとまずは、扱いやすいサイズに落ち着いたようだ。
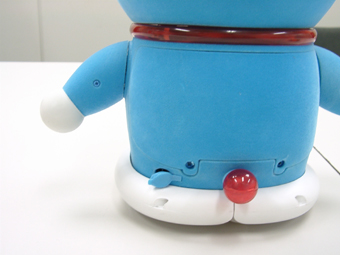 外見にも、気をつかった。たとえばネジ穴などは背面に配置し、極力目立たせないよう心がけたという
外見にも、気をつかった。たとえばネジ穴などは背面に配置し、極力目立たせないよう心がけたというRDDPの今後
今後、リアル・ドリーム・ドラえもん・プロジェクトはどう展開されるのか。大江氏は、具体的なスケジュールはまだ決まっていないと話す。
もっとも、同氏が方向性として挙げたのは「ソフトウェアの強化」。逆にいうと、どのような動作をするか、といった部分はあまり重視しないようだ。
「たとえば、倒れたことを傾斜センサーが感知して、自分で起き上がれるようにするよりも、コミュニケーションインタフェースを強化したい」。具体的には、一度会った人間の顔を覚えていて、「ひさしぶり」と声をかけたり、世間の新しい話題を知っていて「昨日のあれ見た?」と声をかけてくれたりする、といった機能をイメージしているようだ。
後者の機能を実現しようと思えば、ネットワークに接続することが必要に思える、現状では、ドラえもん・ザ・ロボットに携帯電話を接続して、“新しいメロディーにあわせたダンス”プログラムをダウンロードできるが、「これはほんのさわり」(同氏)。
大江氏は、「ネットワークとは、切っても切れない関係」とした上で、今後はインターネットを有効活用していきたいとした。

関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。