Innovative Tech(AI+)
“猫の頭すりすり”を再現したロボット、筑波大学が開発 人間への癒し効果はあるか?
Innovative Tech(AI+):

このコーナーでは、2014年から先端テクノロジーの研究を論文単位で記事にしているWebメディア「Seamless」(シームレス)を主宰する山下裕毅氏が執筆。新規性の高いAI分野の科学論文を山下氏がピックアップし、解説する。
X: @shiropen2
筑波大学に所属する研究者らが発表した論文「Development of a Robotic Device That Performs Head Bunting to Relieve User Tension」は、猫が頭をすり寄せる動作(bunting)を模倣したロボットを開発し、そのいやし効果を検証した研究報告である。buntingとは、動物が他の物体や人間に頭部をこすりつける行動で、特に猫において愛情表現や臭い付けの目的で観察される。
 猫の頭をこすりつける動作
猫の頭をこすりつける動作
 ロボットを使用するイメージ図
ロボットを使用するイメージ図
(関連記事:「持ち上げて伸びるネコの骨や肉を感じる」――猫の体内をリアルに再現したロボット 大阪芸大などが開発)
ロボットの特徴は、動物の頚椎構造にヒントを得た可変剛性機構にある。主に四つの骨部品をジョイントで接続した構造を持ち、部品間は複数のシリコンチューブとステンレス製のワイヤーで結合。ワイヤーは頚椎の屈曲をもたらすものと、屈曲における剛性の強弱をもたらすものに分かれ、それぞれが独立したサーボモーターによって制御できる。
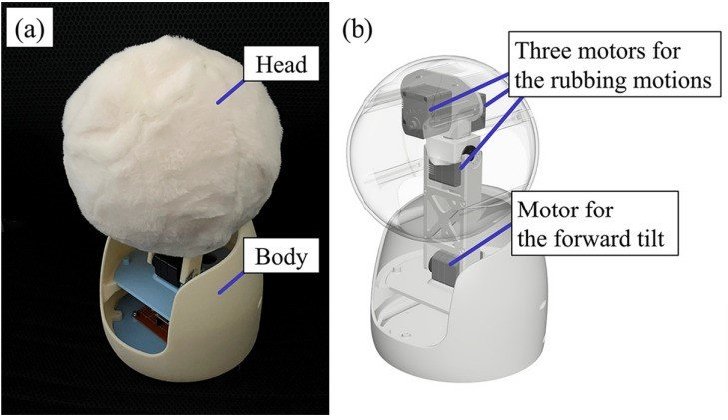 第1プロトタイプの外観および内部構造
第1プロトタイプの外観および内部構造
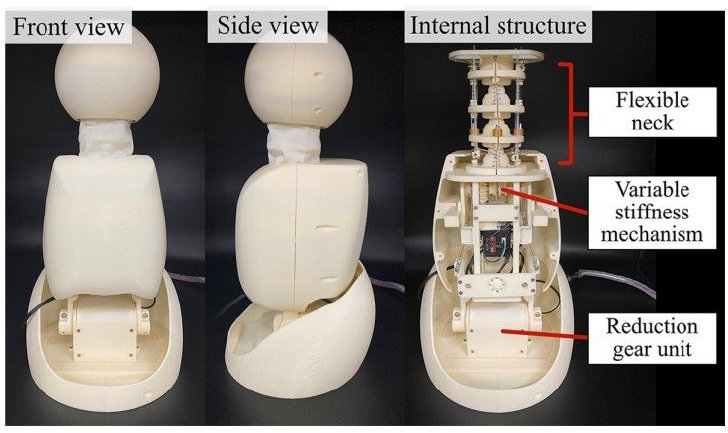 第2プロトタイプの外観および内部構造
第2プロトタイプの外観および内部構造
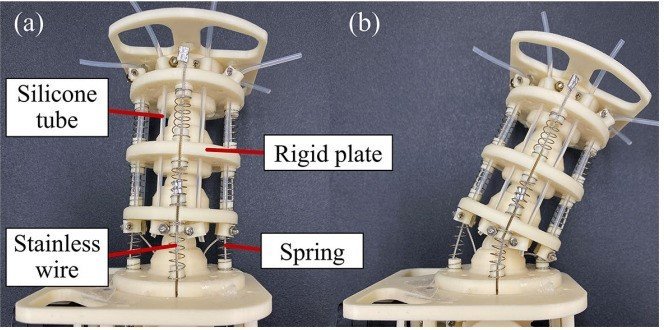 第2プロトタイプの頸椎部
第2プロトタイプの頸椎部
研究チームは、22人の参加者を対象に実験を行い、ロボットの首部を低剛性設定(首の硬さが最小)、高剛性設定(首の硬さが最大)、可変剛性設定(首の硬さが動的に変化)の3種類の条件下で、それぞれ40秒間のbunting動作を実施した。
実験では、質問紙を用いて参加者の気分を測定した結果、ロボットとの相互作用後に参加者の緊張度合が有意に減少することを確認できた。減少の度合は可変剛性設定が最大であったが、条件間での有意差は認められなかった。
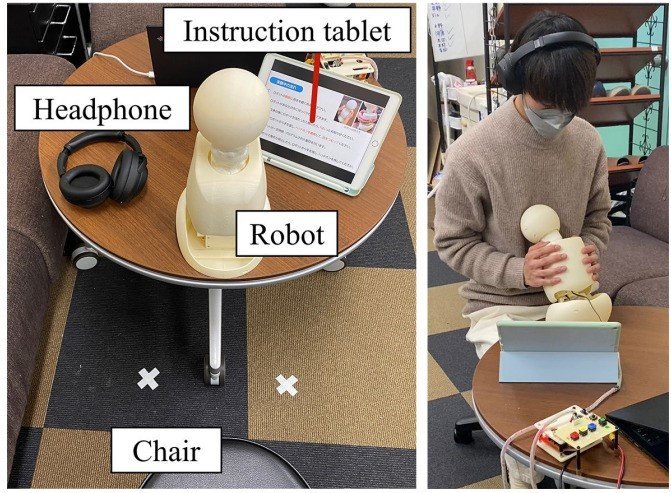 実験の様子
実験の様子
参加者からの自由記述では「剛性が変わると本物のように感じられ、最もリラックスできるように思えた」「強弱の違いが感じとれて、より生命感があり自然に思えた」といった、可変剛性設定の有効性を支持するコメントが寄せられた。これらの結果は、ロボットの剛性変化が人との自然な相互作用に重要な役割を果たすことを示唆している。
Source and Image Credits: Yuga Adachi and Fumihide Tanaka. 2024. Development of a Robotic Device that Performs Head Bunting to Relieve User Tension. J. Hum.-Robot Interact. 14, 2, Article 20(June 2025), 15 pages. https://doi.org/10.1145/3700600
Copyright © ITmedia, Inc. All Rights Reserved.
Innovative Tech(AI+)
2019年の開始以来、多様な最新論文を取り上げている連載「Innovative Tech」。ここではその“AI編”として、人工知能に特化し、世界中の興味深い論文を独自視点で厳選、解説する。執筆は研究論文メディア「Seamless」(シームレス)を主宰し、日課として数多くの論文に目を通す山下氏が担当。イラストや漫画は、同メディア所属のアーティスト・おね氏が手掛けている。
この記事の著者
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
セルフ給油、実はスタッフが手動で許可していた!? コスモ石油の「AI監視」は消えゆくガソリンスタンドを救うか
-
2
OpenAIのサム・アルトマンCEO、来日中止 都内イベント登壇予定を変更
-
3
月間売上1億円超、“推しAI”アプリ「Zeta」がオタク女子わしづかみ ただし危うさも
-
4
Anthropic、デザインツール「Claude Design」を強化 Codeとの双方向連携やCanvaなどへの出力をサポート
-
5
OpenAIの高度AIでソフトバンクの脆弱性を1万件発見 孫正義氏「大変な危機」 日本の重要インフラ企業へ診断サービス提供
-
6
OpenAI創業者、巨大モデルのアップデート作業は「大きな苦痛だった」――月イチ更新を可能にした体制とデータの重要性
-
7
生成AI×3D CADでどこまでできるか試してみた
-
8
ChatGPT vs. Google検索──どっちで調べるのが学習効果が高い? 8日間の実験で検証した研究
-
9
「ChatGPTのコネクタでつながるし、M365 Copilotいらなくない?」→有識者3人に聞いてみた 知らないと損するコンテキスト管理「Work IQ」の仕組み
-
10
財務諸表だけでは勝てない ブルームバーグ日本トップが語る「非構造化データ」の重要性
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR