EXPO 2025 大阪・関西万博
人が乗れるライオン型ロボ「CORLEO」、万博で実機を見てきた 首や頭がないワケは? 全身を写真で紹介
川崎重工業は、4月13日に開幕する「2025年日本国際博覧会」(大阪・関西万博)で、人が乗れる四足歩行ロボット「CORLEO」(コルレオ)のコンセプトモデルを展示する。同社は9日、記者向けにコルレオの実機を一足先に披露。開発経緯などを明かした。
 人が乗れる四足歩行ロボット「CORLEO」
人が乗れる四足歩行ロボット「CORLEO」
コルレオは、2050年の移動手段をイメージして開発したロボット。頭のない四足動物のような見た目をしており、山岳地帯のような険しい道での走行を想定。実際に操縦はできないが「乗り手の重心移動を、前方のハンドル部分と、前脚と後脚の間にあるステップで検知して操縦する仕組み」「動力源には発電用水素エンジンを採用し、電力で4脚に搭載したパワーユニットを駆動する」などの設定を構想している。
 ハンドル部分
ハンドル部分
 ステップ
ステップ
万博では、その場で体勢を上下させる姿を披露。乗り手の姿勢を保つために搭載した、後脚部と前脚部が分かれて縦にスイングする機構の様子を見られた他、脚の先端に取り付けたひづめ型の部品なども確認できた。
 前かがみの体勢
前かがみの体勢
 背中を反らす体勢
背中を反らす体勢
 ひづめ型の部品
ひづめ型の部品
車輪ではなく「脚」での移動に挑んだワケ
川崎重工業は、なぜコルレオのような四足歩行ロボットを開発したのか。万博に展示するコンセプトモデルの企画時、最初に決めたテーマが「移動本能」だった。
 左斜め前からの様子
左斜め前からの様子
同社は造船業で事業を始め、船以外にも鉄道や二輪バイクなどさまざまなモビリティを手掛けてきた。今回同社は「人は移動するほど幸せを感じる」という米マイアミ大学の研究などを参照。人には「移動本能」があると仮定し、これを刺激する乗り物の開発を23年に始めた。結果、動物をモデルに脚で移動する乗り物の構想が生まれたという。
一方で「カワサキ」と言えば、二輪バイクを思い浮かべる人も多いだろう。車輪ではなく脚での移動を選んだのは、「道なき道を乗り物で行く」といった体験を多くの人に提供するためという。
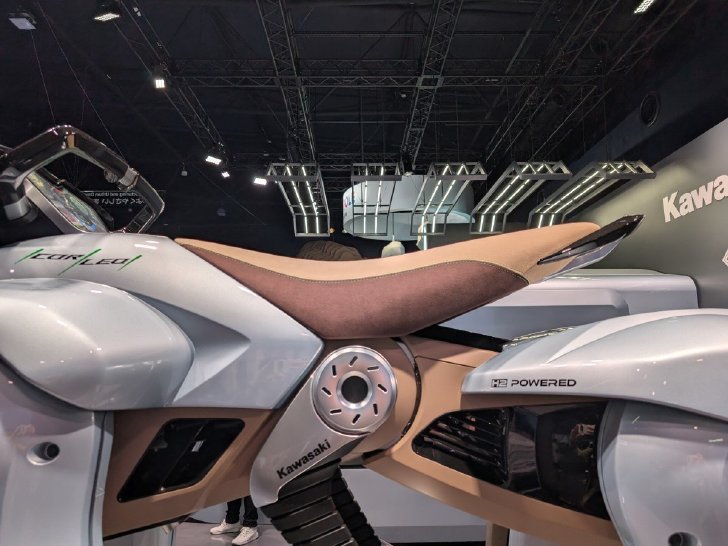 二輪バイクのシートに似た形状のシート
二輪バイクのシートに似た形状のシート
「バイクのプロライダーは、どんな道でも、極端に言えば崖でも駆け上がることができるけれど、それは本当に一部の限られた人しかできない。それを誰もが安全にチャレンジできるようにしたかった」(川崎重工業)
この構想を具体化するため、脚の本数やモデルとする動物などを検討。最終的にはコルレオという名前の通り、ライオンをモデルに採用(Leoは英語で獅子座の意)し、現在のデザインに至った。首や頭、尾などの要素を省いた理由を聞くと「あくまでモビリティらしさを追求した」「動物の要素を削りながらも、かといって乗り物すぎないバランスを狙った」と説明した。

 正面(左)と背面(右)
正面(左)と背面(右)
ちなみに当初モデルにしていた動物はチーター。走る速度が速いというイメージから選んだというが、モビリティとしての安定性を考え、より身体の大きいライオンにしたという。
今後の展望は「万博での反響」次第?
今回の万博で展示するのは、あくまでコンセプトモデルであり、実際に走行できるわけではない。一方、川崎重工グループでは産業用ロボットの先進技術を使い、二輪バイクを開発するチームの参加のもと「机上ではあるが、基本設計まではしっかり行った」という。「まだ会社として開発しようというフェーズではない」としつつ、万博に試験的に来場者を招く「テストラン」では、非常に反響が大きかったとして、今後の展望を語った。
「万博に来場した皆さんの反響が大きければ『じゃあこの先、川崎、本気になりますか』ということで考えている」(川崎重工業)
Copyright © ITmedia, Inc. All Rights Reserved.
この記事の著者
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
アニメ特化動画生成AI「AnimeGen」無償公開、商用利用も可 国内AIベンチャーAIdeaLab
-
2
「足りないのはCOBOL人材じゃない」 日立が語る、AI時代のシステム刷新における“人”の役割
-
3
OpenAIのブラウザ「ChatGPT Atlas」終了へ 公開から1年足らずで
-
4
Anthropic、「Fable 5」の無償アクセスと「Claude Code」利用上限50%増を7月19日まで延長
-
5
請求書は青天井 Microsoftトップが「AIモデル大手に主導権を渡すな」と叫ぶ真意
-
6
「GPT-Liveが“まるで人間”」ってホンマ? 出汁を「でじる」、トーストを「素焼き」て言うてたけど……
-
7
「アポ取り地獄」から解放か 1日数千件テレアポをこなす「話すAI」が登場
-
8
Claude「サブスク最上位プラン」6カ月間無料で提供 OSS開発者向けキャンペーン、対象を拡大
-
9
GMOグループ、AI時代に「エンジニア含む組織体制見直し」 熊谷代表が「AI変革最高責任者」に
-
10
「誰にも会わずに帰る店」の寂しさ すかいらーくがロボット配膳の先に挑むAI接客
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR