宇宙(そら)へ? エプソン、進化した飛行ロボット「μFR-II」を公開(2/2 ページ)
電池を搭載したμFR-IIは、約3分間の飛行が可能になった。さらに、これまのラジコン式飛行(プロポで操作)にくわえ、制御システムとBluetoothを介して通信を行うことで、人の手を離れた“自律飛行”を実現する。本体に搭載したCMOSセンサーを使い、上空から撮影した画像を地上のモニターに送信したり、2つのLEDを点灯させて地上にいる人たちとコミュニケーションをとるといったことも可能だ。
「μFRのゴールは、いわば“メカトンボ”。たとえばオニヤンマは、3グラム程度の体重で空中を高速に移動し、ホバリングもできる。μFRも、数グラムの重量で高速に飛行し、高所や狭所など人が行けない場所で作業を行えるようにしたい」(宮澤氏)。
μFR、宇宙へ?
エプソンが想定するμFRの活動場所は、宇宙だった。もちろん、飛行時には重力や風の影響を強く受けるため、活動場所は制限される。しかし、μFR-IIにCMOSセンサーを搭載したことで、空間におけるセンシングという使い方が現実的になった。さらに揚力がアップすれば、軽量のサンプル取得、運搬などのデリバリ用途も可能。逆に重力が地球よりも小さい場所なら、既に実用的な能力といえる。
「宇宙へのペイロードとしては、特に価値が大きい。宇宙ステーションなど、大気はあるが風のないところが(活動場所として)理想的だ」(宮澤氏)。
 μFRの近未来イメージ図@どこかの星。カウリングは「ムッシュ」を彷彿とさせる
μFRの近未来イメージ図@どこかの星。カウリングは「ムッシュ」を彷彿とさせる同社が挙げたμFRの用途は、レスキュー、セキュリティ、監視、観察、メンテナンス、環境観測、報知など多岐にわたる。また宮澤氏は、目的地まで母船で移動し、そこで切り離されたμFRが群れをなして行動するといった利用イメージも示した。
 母船から発進するμFR。母船にはCCDカメラを搭載してμFRを視覚的に捕捉し、3次元の位置情報を得る仕組みだ。なにやらカッコイイ
母船から発進するμFR。母船にはCCDカメラを搭載してμFRを視覚的に捕捉し、3次元の位置情報を得る仕組みだ。なにやらカッコイイ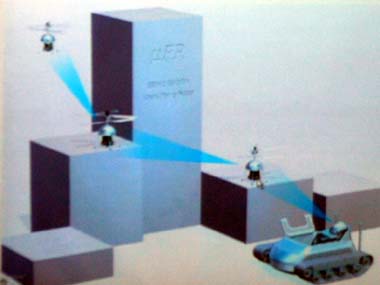 視認できない場所にも進入するために団体行動。複数のμFRを使い、各機をリピーターとして通信を行う
視認できない場所にも進入するために団体行動。複数のμFRを使い、各機をリピーターとして通信を行う「公開テスト飛行」のシステムは、上のイメージを実証するものだ。会場に複数のCCDカメラを設置し、ロボットの底面にはマーカーを付ける。外部から視覚的にμFR-IIを補足しつつ、ネットワーク化された位置検出サーバと制御サーバが連携し、自律的に飛行するという仕組み。制御サーバは千葉大学・野波研究室の協力を得て開発されたもので、ホバリングを主体とした飛行経路の生成および自律飛行の制御が可能だ。
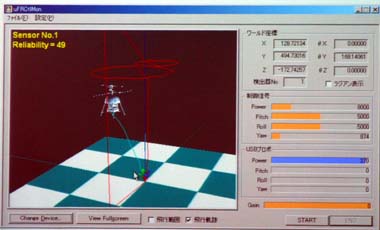 飛行経路を作成するソフトウェア。もちろん、3Dの視覚的表現が可能だ
飛行経路を作成するソフトウェア。もちろん、3Dの視覚的表現が可能だデータはBluetoothでやり取りするため、無線伝送可能なエリアを出ることはできない。したがって、50センチほど上昇してホバリングし、そこでプログラムによる自律飛行に移行、さらに30センチ並行移動したのち着陸するという形で実施された。離陸は「環境が大きく変わるため」手動だ。
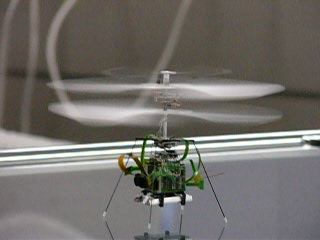 飛び立つ瞬間
飛び立つ瞬間 飛んでます(プロポで操作中)
飛んでます(プロポで操作中)しかし今回は、自律飛行に移行する前に通信が途切れてしまったり、エアコンの風の影響を受けたり、さらにはバッテリーがあがってしまったりとトラブル続き。残念ながら、自律飛行のデモンストレーションには至らなかった。
エプソンは、8月27日に東京国際フォーラムで開幕する「未来創造フェスタ〜先端技術フェア〜」でμFR-IIのデモンストレーションを行う予定。というわけで、この続きは国際フォーラムでどうぞ。
関連記事
- まるでタケコプター 空を飛ぶ小型ロボットをエプソンが開発
セイコーエプソンはこのほど、空を飛ぶ超小型ロボット「μFR」(マイクロフライングロボット)を開発した。11月19日に開幕する「2003国際ロボット展」(東京ビッグサイト)で披露する。 - 空を飛び、感情を理解し、自然な表情を見せる――進化するロボットたち
2足歩行ぐらいでは驚かなくなるほど、近年のロボットの進化は目ざましい。ビッグサイトで開幕した「2003国際ロボット展」では、超小型ロボットが空を飛んだり、会話を通じて人間の感情を理解したりなど、進化した最新ロボットが集まった - “タケコプター”こぼれ話
先週の記事では、セイコーエプソンの“タケコプター”を含むロボットネタがTop10にランクイン。マンガに描かれた“空を飛ぶ道具”は物理学的に無理としても、いつまでも勝手に飛び回る“虫”のようなロボットならできるかもしれない。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PRアイティメディアからのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。