気球ロボット、成層圏への長い道のり
はるか上空20キロ付近の成層圏に止まり、通信や観測のプラットフォームとして利用される“高高度飛行体”。米AeroVironmentのソーラープレーン「Helios」などがよく知られているが、低コストと扱い易さで注目を集めているのが飛行船タイプだ。そして日本でも、骨組みのない軟式飛行船に自律制御型の電気推進装置を組み込んだ「気球ロボット」の開発が進められていた。
気球ロボットは、NEDO(新エネルギー・産業技術総合開発機構)の基盤技術研究促進事業として開発を進めているもの。委託先は、民間企業のエー・イー・エス(AES)、ピー・アイ・イー(PIE)、独立行政法人の産業技術総合研究所(AIST)および東京大学の4団体で、これまでに2回の実証実験を実施している。先週末に行われたハイパーメディア・コンソーシアムのシンポジウムでは、産業技術総合研究所の恩田昌彦主任研究員とPIEの佐藤実社長が実証実験の模様を説明した。
 準備中の2号機。機体の赤いラインは、上空で識別しやすくするためのもの
準備中の2号機。機体の赤いラインは、上空で識別しやすくするためのもの成層圏プラットフォームに気球を使うメリットは、機体そのものが空気よりも軽く、長期滞空に適していることだ。気球ロボットの場合、ポリエチレン製の幕に充填したヘリウムガスにより浮力を得る。そして太陽電池と蓄電池、もしくは高効率の燃料電池を使ってプロペラを回し、ミッション空域に止まる。たとえ上空でトラブルが発生してもすぐには落ちてこないため、安全面でも有利だ。
また、低コストで運用できる点も見逃せない。気球ロボットの運用スタイルは“使い捨て”。一度上空に上げると6カ月程度使用するが、その後は別の機体を上げて交代させるという。垂直上昇が可能な気球は、ミッション空域に到達するまでの時間がソーラープレーンの4〜5時間に対して約40分と短く、交代もスムーズ。一方、役目を終えた気球ロボットは降下し、機体など多くの部分は再利用するものの、基本的には消耗品として扱われる。
とはいえ、成層圏まで行き、長期ミッションをこなして帰ってくる気球にはさまざまな機構が必要になる。たとえば、上昇時の姿勢制御、定点滞空に必要な推進器と自律制御機構、降下を開始するためのタイマー、降下時に機体からヘリウムガスを抜く「球皮カッター」と呼ばれる機構、着地時の速度を制御する「抵抗傘」(パラシュート)など。こうした複雑さが“気球ロボット”と言われる理由だろう。
ただし、成層圏プラットフォームの研究が進んでいる米国や日本をはじめ、世界中を見渡しても、いまだ長期滞空を実現した例はない。このためNEDOの研究促進事業では、まず高度15キロ以上の上空に気球ロボットを到達させ、指定した定点を中心とする半径2キロ以内の空域に連続6時間以上滞空させることを目指している。その上で、地表との通信など情報収集・伝達用のプラットフォームとして利用できることを実証しなければならない。
一号機はわずか50分間の飛行
1号機の実験は平成15年9月に実施した。剛性維持システムを備えた30メートル級の機体は、360度回転する推進機や観測機器、カメラなどを搭載している。これを茨城県ひたちなか市にある国営公園「ひたち海浜公園」から海上に飛ばし、上空15キロを目指す計画だった。
しかし、機体を地表につなぎ止めておく係留ケーブルが切られた途端、トラブルが発生した。恩田氏によると、「本来は上空で無線制御するはずの“降下開始タイマー”にスイッチが入っていて、上昇を始めたとき既に15分が経過していた。それに浮力不足が手伝い、機体は上空5キロまでしか上がらなかった」という。
浮力不足の原因は、時間が足りずにヘリウム充填後の浮力チェックを省いてしまったこと。しかも降下タイマーが作動して、機体からはヘリウムガスが抜けていく。結局、4時6分に上昇を開始した気球ロボットからの信号は、4時51分に途絶えた。
飛行時間はわずか50分程度。機体は推進機と分離して近くの海に落ちた。「袋(飛行船のエンベローブ)は回収できたが、推進機はダメだった。設計がまずかったうえ、近くに(機体を)落としたのも安全上問題がある」(恩田氏)。
2号機は上空17キロに到達するも……?
2号機は、前回の反省をもとに新たに設計された。機体は同じだが、剛性をアップした新しい推進機を搭載。機体制御に使う無線もアップリンクとダウンリンクを別チャンネルに分け(前回は1ch)、ビットエラーが発生しないようにした。事前にヨー制御や定点保持、降下時に地上1キロ付近で開くパラシュートなど、綿密な実験を行い、新しい気球ロボットが完成した。
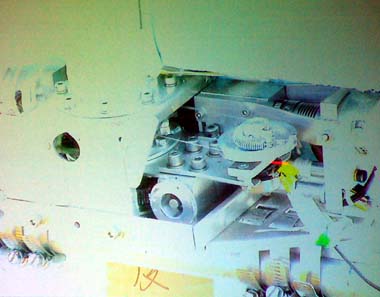 ヨー制御機構。中央がギアボックスになっている
ヨー制御機構。中央がギアボックスになっている 学校の体育館を借りて準備中
学校の体育館を借りて準備中前回と同じひたち海浜公園で2度目の実験が行われたのは平成16年。このとき、気球ロボットの高度は上空17キロに達した。
しかし、やはりトラブルに襲われた。「アップリンクの障害検査中に係留ロープが切れ、機体が上がってしまった」。
準備中に上昇を開始してしまった2号機は、そのうち無線制御もきかなくなくなり、“漂流”してしまう。そして、その日の17時頃、銚子沖400〜700キロの海上に落下。「漂流したことで、後で航空局に呼ばれ、安全上の問題があると指導を受けた」。
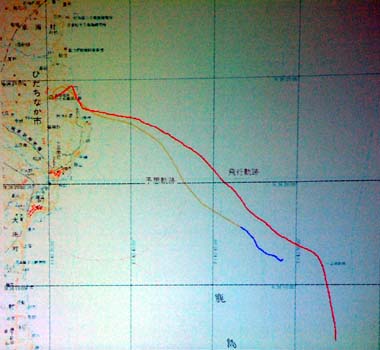 2号機の飛行経路。
2号機の飛行経路。「失敗」といってしまえばその通りだが、2度の実証実験を一言で済ますことはできない。実際、実験に参加した各社は、“次”に繋がる手応えを感じている様子だ。「2号機は、水平時(ヘリウムを充填して地上につながれているとき)に回路系がクリアできてされいれば、成功していたはずだと考えている。2度の実験を、これまで低予算でよくこなしてきた、というのが感想だ」(佐藤社長)。
ちなみに、プロジェクトの予算は年間3000万円で、参加各社が分担している。もう少し余裕があれば、たとえば大型格納庫を借りて飛行前の準備などが可能になるといった事情もあり、予算不足というのが本音のようだ。
しかし、もともと低予算も気球ロボットのメリットの一つ。恩田氏は、「まずは実際にやってみせることが重要だと思う。しかも、限られた資源の中で」と話していた。
今回のプロジェクトでは、5年間で3回の実証実験が予定されている。残るチャンスはあと1回。現在は準備期間として1年間のブランクを置いているが、次回はこれまでより「大きめ」の60メートル級気球ロボットを飛ばす予定だ。
関連記事
- 飛行船からブロードバンド提供――米アトランタ
来週、アトランタ市の上空に、ブロードバンド接続を提供する企業が飛行船を浮かべ、デモンストレーションを行う。 - “ミリ波”が成層圏から降ってくる――CRLが高高度飛行体で実証実験
通信総合研究所(CRL)が今秋、高高度飛行体を使って成層圏通信用ミリ波帯を利用した通信の実証実験を行う。通信・放送サービスの中継基地などで期待される「成層圏プラットフォーム」が、いよいよ実用化への第一歩を踏み出した - 世界初の「成層圏無線中継」で見えてきた通信・放送の“新たなプラットフォーム”
通信総合研究所(CRL)が6日行った研究報告会で、HDTVデジタル放送やIMT-2000通信が実証された世界初の「成層圏無線中継」の実験概要や、成層圏プラットフォームの有効性などが紹介された - 川重,成層圏プラットフォーム研究で試験用飛行船
川崎重工業はこのほど,成層圏プラットフォーム研究に利用する無人飛行船を完成させた。無人飛行制御システムの研究に活用する。 - “成層圏プラットフォーム”の実用化は、どこが早いか?
成層圏を浮遊する“高高度飛行体”を通信・放送サービスや観測・監視システムなどに利用する「成層圏プラットフォーム」構想。その最新状況や各国の取り組みが、5日に行われた「高高度飛行体IT基地研究会」で紹介された - ブロードバンド中継局が成層圏を浮遊する――高高度飛行体
成層圏を浮遊する“高高度飛行体”をブロードバンドの中継局にし,全国規模の高速無線通信網を構築する――。都内で開催された「高高度飛行体IT基地研究会」では,高高度飛行体に関する最新の研究内容が発表された。 - 次世代通信データは成層圏から降ってくる?――高高度飛行体のシンポジウムが開催
成層圏を浮遊することができる“高高度飛行体”に関するシンポジウムが開催された。今夏,日本でも高高度飛行体を使った成層圏通信システムの実証実験がスタートし,IMT-2000やデジタル放送,ブロードバンド通信の中継実験が行われるという。 - 空飛ぶ通信タワー「Helios」
ブロードバンド接続を企業に提供するための「通信タワー」の役割を果たす,世界初の無人飛行機が注目を集めている。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special
PR


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。