「エンジニアに無理と怒られた」――熱烈“攻殻”ファンが思い込めた「1/8タチコマ」開発の舞台裏(2/6 ページ)
それほどのファンだけに、開発は妥協できなかった。「タチコマには、さまざまな要素が詰まっている。4足歩行のロボットでもあるが、コミカルな動きをしながら感情豊かに会話するキャラクターでもある。1人のファンとしてタチコマをどう仕様に落とすか、検討しながら作り始めた」(海田さん)。
最大の問題はバランスだった。劇中のタチコマは、ボディの背部に人間が乗り込む「ポッド」が付いたクモのような形をしている。だが「そのまま再現しようとすると重心が後ろに寄るため、4本足で立つことすら難しく倒れてしまう」という。
「市販されている4足歩行ロボットだと、ボディの四方に均等に脚部が付いているのがバランスを保つには理想的。しかしタチコマは、既存のデザインを崩せない。例えばポッドのサイズを大きく変えるなど、デフォルメをし過ぎるとタチコマではなくなってしまう。すごく悩ましかった」(海田さん)
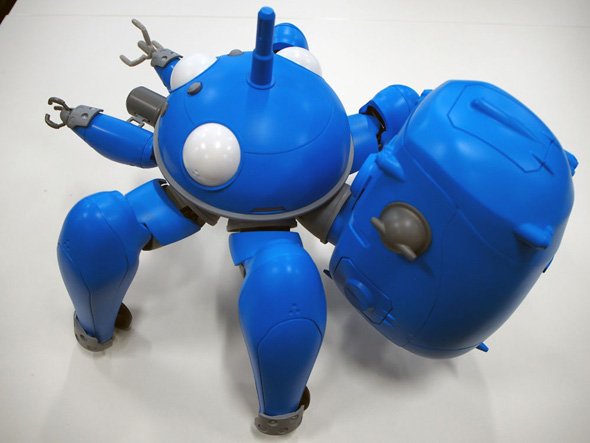 背中のポッドが重いため、バランスが課題に
背中のポッドが重いため、バランスが課題に
劇中のタチコマは腕や脚を大きく動かし、身振り手振りで感情を表現するのも特徴だ。こうした特徴も「満足できるレベルになるまで再現しようとして苦しんだ」という。「例えば脚を横に開くには、脚部のタイヤが横滑りしないといけない。しかし滑りやすくしすぎると踏ん張れなくなり、立てなくなる」(海田さん)。
「作中でタチコマが取ったポーズは、可能な限りできるようにしたかった」と海田さん。「(同程度のサイズの)市販ロボットにしては相当多い」という21個のモーターを搭載し、可動部を増やしたという。「アニメキャラのフィギュアを買った人が、好きなポーズを取らせたいと思うのと同じ気持ち。欲を言えばあと4個はモーターを載せたかったが、担当のエンジニアから『無理』と怒られた」。
Copyright © ITmedia, Inc. All Rights Reserved.
この記事の著者
関連記事
こんなメディアも見られています
ITmedia NEWSに関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
本日の新着記事
ITmedia NEWS SNS
インフォメーション
注目情報をチェック
ITmediaNEWSをフォロー
あなたにおすすめの記事PR